 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStyle-Based Neural Architectures for Real-Time Weather Classification
Apr 20, 2026In this paper, we present three neural network architectures designed for real-time classification of weather conditions (sunny, rain, snow, fog) from images. These models, inspired by recent advances in style transfer, aim to capture the stylistic elements present in images. One model, called "Multi-PatchGAN", is based on PatchGANs used in well-known architectures such as Pix2Pix and CycleGAN, but here adapted with multiple patch sizes for detection tasks. The second model, "Truncated ResNet50", is a simplified version of ResNet50 retaining only its first nine layers. This truncation, determined by an evolutionary algorithm, facilitates the extraction of high-frequency features essential for capturing subtle stylistic details. Finally, we propose "Truncated ResNet50 with Gram Matrix and Attention", which computes Gram matrices for each layer during training and automatically weights them via an attention mechanism, thus optimizing the extraction of the most relevant stylistic expressions for classification. These last two models outperform the state of the art and demonstrate remarkable generalization capability on several public databases. Although developed for weather detection, these architectures are also suitable for other appearance-based classification tasks, such as animal species recognition, texture classification, disease detection in medical imaging, or industrial defect identification.
* 9 pages, 21 figures
Heuristic Style Transfer for Real-Time, Efficient Weather Attribute Detection
Apr 15, 2026We present lightweight and efficient architectures to detect weather conditions from RGB images, predicting the weather type (sunny, rain, snow, fog) and 11 complementary attributes such as intensity, visibility, and ground condition, for a total of 53 classes across the tasks. This work examines to what extent weather conditions manifest as variations in visual style. We investigate style-inspired techniques, including Gram matrices, a truncated ResNet-50 targeting lower and intermediate layers, and PatchGAN-style architectures, within a multi-task framework with attention mechanisms. Two families are introduced: RTM (ResNet50-Truncated-MultiTasks) and PMG (PatchGAN-MultiTasks-Gram), together with their variants. Our contributions include automation of Gram-matrix computation, integration of PatchGAN into supervised multi-task learning, and local style capture through local Gram for improved spatial coherence. We also release a dataset of 503,875 images annotated with 12 weather attributes under a Creative Commons Attribution (CC-BY) license. The models achieve F1 scores above 96 percent on our internal test set and above 78 percent in zero-shot evaluation on several external datasets, confirming their generalization ability. The PMG architecture, with fewer than 5 million parameters, runs in real time with a small memory footprint, making it suitable for embedded systems. The modular design of the models also allows style-related or weather-related tasks to be added or removed as needed.
Sparse LiDAR and Stereo Fusion for Depth Estimationand 3D Object Detection
Mar 05, 2021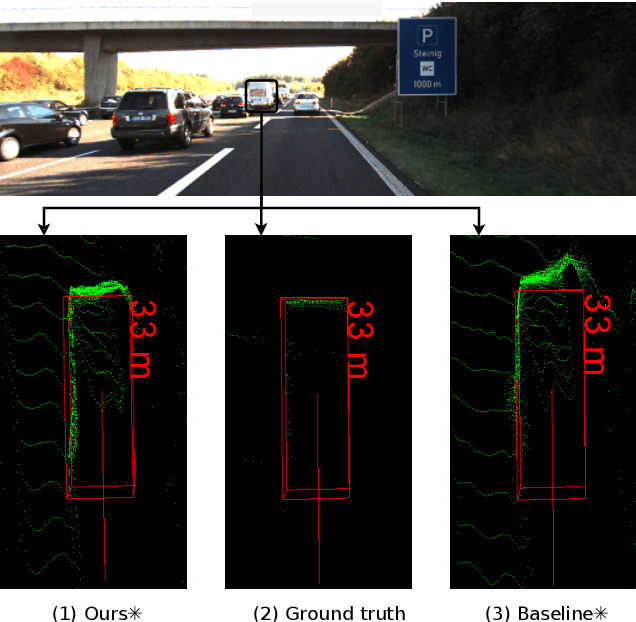
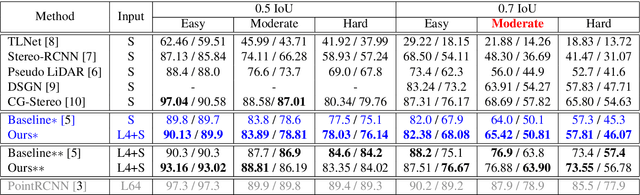
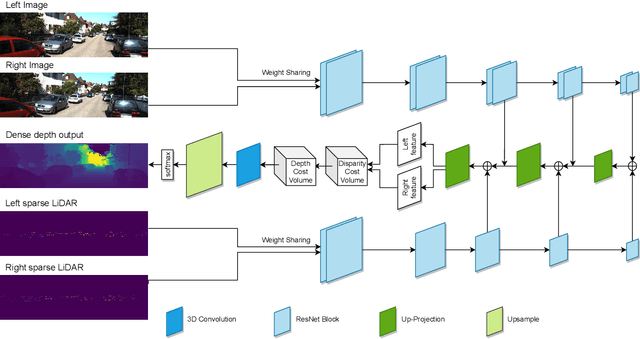
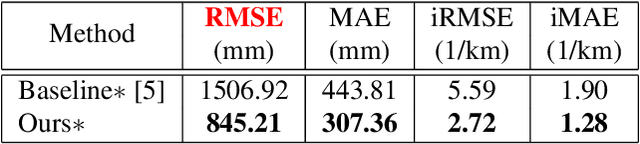
The ability to accurately detect and localize objects is recognized as being the most important for the perception of self-driving cars. From 2D to 3D object detection, the most difficult is to determine the distance from the ego-vehicle to objects. Expensive technology like LiDAR can provide a precise and accurate depth information, so most studies have tended to focus on this sensor showing a performance gap between LiDAR-based methods and camera-based methods. Although many authors have investigated how to fuse LiDAR with RGB cameras, as far as we know there are no studies to fuse LiDAR and stereo in a deep neural network for the 3D object detection task. This paper presents SLS-Fusion, a new approach to fuse data from 4-beam LiDAR and a stereo camera via a neural network for depth estimation to achieve better dense depth maps and thereby improves 3D object detection performance. Since 4-beam LiDAR is cheaper than the well-known 64-beam LiDAR, this approach is also classified as a low-cost sensors-based method. Through evaluation on the KITTI benchmark, it is shown that the proposed method significantly improves depth estimation performance compared to a baseline method. Also, when applying it to 3D object detection, a new state of the art on low-cost sensor based method is achieved.
What happens for a ToF LiDAR in fog?
Mar 14, 2020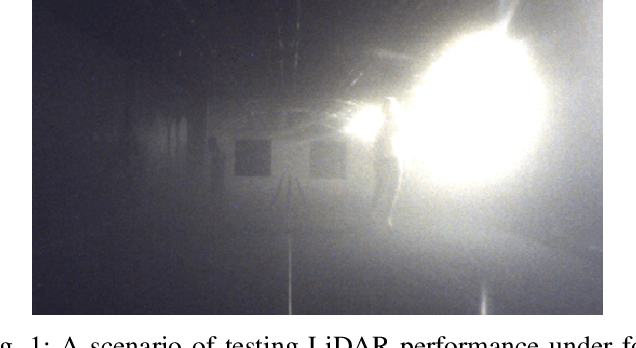
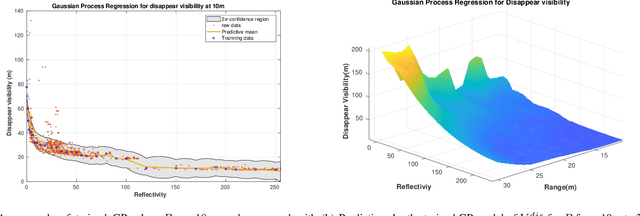
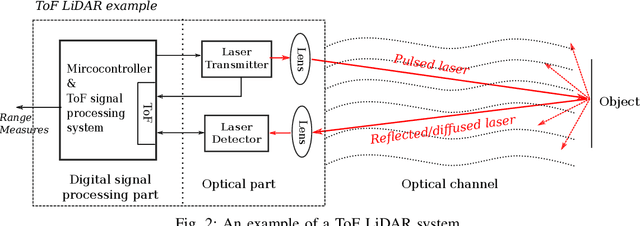
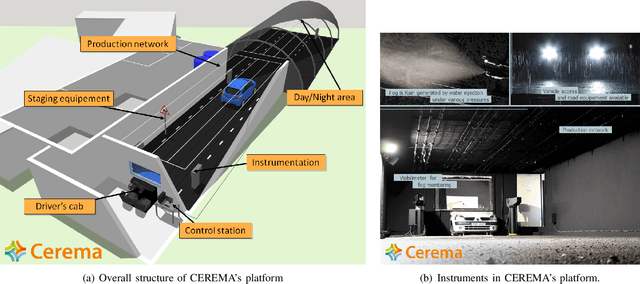
This article focuses on analyzing the performance of a typical time-of-flight (ToF) LiDAR under fog environment. By controlling the fog density within CEREMA Adverse Weather Facility 1 , the relations between the ranging performance and fogs are both qualitatively and quantitatively investigated. Furthermore, based on the collected data, a machine learning based model is trained to predict the minimum fog visibility that allows successful ranging for this type of LiDAR. The revealed experimental results and methods are helpful for ToF LiDAR specifications from automotive industry.
Baselines and a datasheet for the Cerema AWP dataset
Jun 11, 2018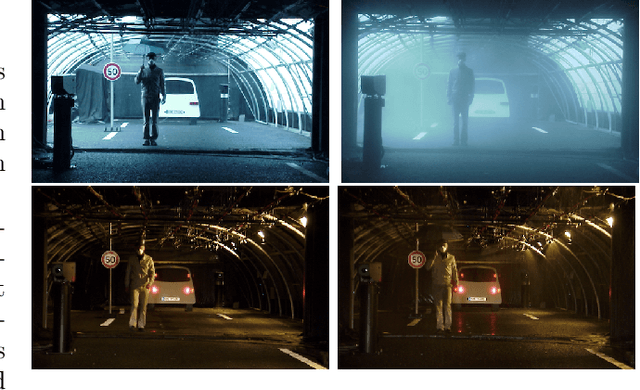
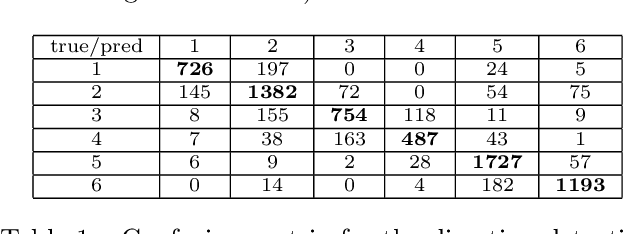
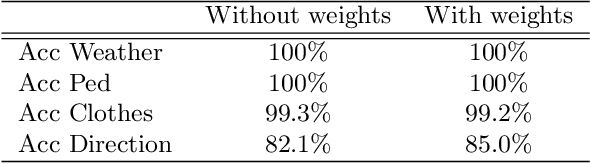
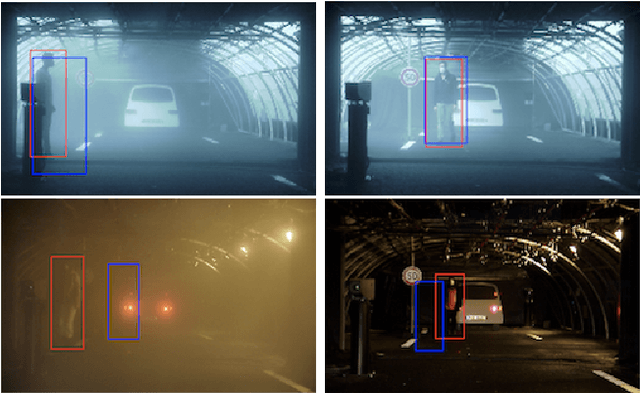
This paper presents the recently published Cerema AWP (Adverse Weather Pedestrian) dataset for various machine learning tasks and its exports in machine learning friendly format. We explain why this dataset can be interesting (mainly because it is a greatly controlled and fully annotated image dataset) and present baseline results for various tasks. Moreover, we decided to follow the very recent suggestions of datasheets for dataset, trying to standardize all the available information of the dataset, with a transparency objective.