 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePedro A. Ortega
An Adversarial Interpretation of Information-Theoretic Bounded Rationality
Apr 22, 2014
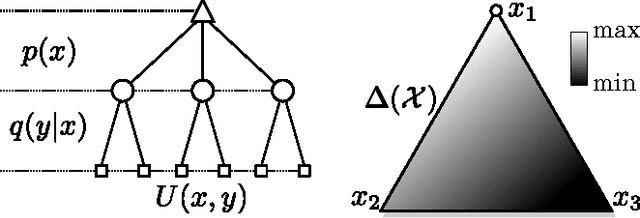
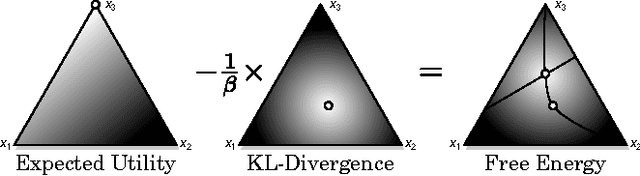
Recently, there has been a growing interest in modeling planning with information constraints. Accordingly, an agent maximizes a regularized expected utility known as the free energy, where the regularizer is given by the information divergence from a prior to a posterior policy. While this approach can be justified in various ways, including from statistical mechanics and information theory, it is still unclear how it relates to decision-making against adversarial environments. This connection has previously been suggested in work relating the free energy to risk-sensitive control and to extensive form games. Here, we show that a single-agent free energy optimization is equivalent to a game between the agent and an imaginary adversary. The adversary can, by paying an exponential penalty, generate costs that diminish the decision maker's payoffs. It turns out that the optimal strategy of the adversary consists in choosing costs so as to render the decision maker indifferent among its choices, which is a definining property of a Nash equilibrium, thus tightening the connection between free energy optimization and game theory.
Generalized Thompson Sampling for Sequential Decision-Making and Causal Inference
Mar 18, 2013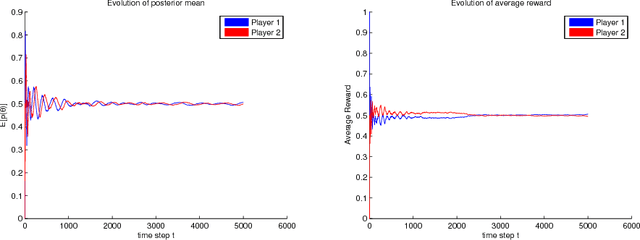
Recently, it has been shown how sampling actions from the predictive distribution over the optimal action-sometimes called Thompson sampling-can be applied to solve sequential adaptive control problems, when the optimal policy is known for each possible environment. The predictive distribution can then be constructed by a Bayesian superposition of the optimal policies weighted by their posterior probability that is updated by Bayesian inference and causal calculus. Here we discuss three important features of this approach. First, we discuss in how far such Thompson sampling can be regarded as a natural consequence of the Bayesian modeling of policy uncertainty. Second, we show how Thompson sampling can be used to study interactions between multiple adaptive agents, thus, opening up an avenue of game-theoretic analysis. Third, we show how Thompson sampling can be applied to infer causal relationships when interacting with an environment in a sequential fashion. In summary, our results suggest that Thompson sampling might not merely be a useful heuristic, but a principled method to address problems of adaptive sequential decision-making and causal inference.
* 28 pages, 5 figures
A Nonparametric Conjugate Prior Distribution for the Maximizing Argument of a Noisy Function
Nov 10, 2012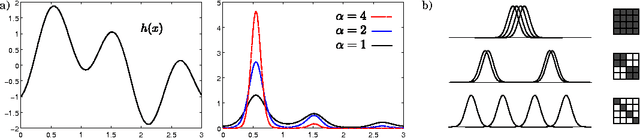
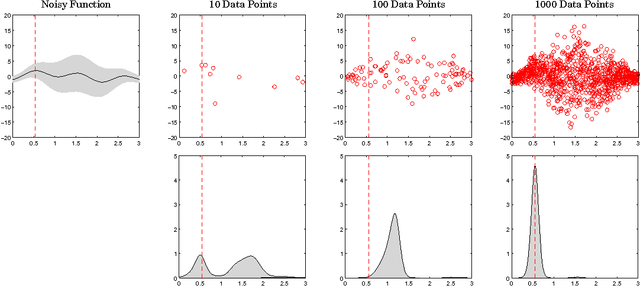
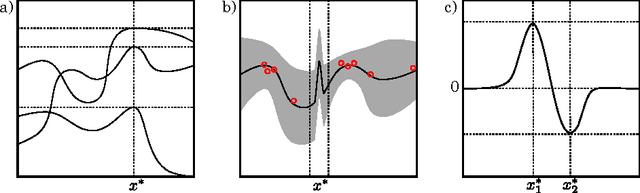

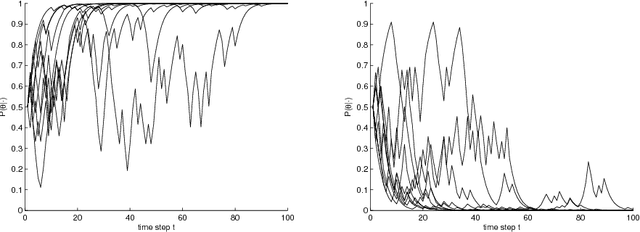
We propose a novel Bayesian approach to solve stochastic optimization problems that involve finding extrema of noisy, nonlinear functions. Previous work has focused on representing possible functions explicitly, which leads to a two-step procedure of first, doing inference over the function space and second, finding the extrema of these functions. Here we skip the representation step and directly model the distribution over extrema. To this end, we devise a non-parametric conjugate prior based on a kernel regressor. The resulting posterior distribution directly captures the uncertainty over the maximum of the unknown function. We illustrate the effectiveness of our model by optimizing a noisy, high-dimensional, non-convex objective function.
* 9 pages, 5 figures
Free Energy and the Generalized Optimality Equations for Sequential Decision Making
May 17, 2012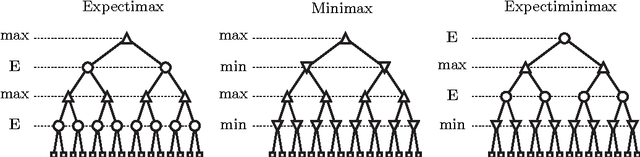
The free energy functional has recently been proposed as a variational principle for bounded rational decision-making, since it instantiates a natural trade-off between utility gains and information processing costs that can be axiomatically derived. Here we apply the free energy principle to general decision trees that include both adversarial and stochastic environments. We derive generalized sequential optimality equations that not only include the Bellman optimality equations as a limit case, but also lead to well-known decision-rules such as Expectimax, Minimax and Expectiminimax. We show how these decision-rules can be derived from a single free energy principle that assigns a resource parameter to each node in the decision tree. These resource parameters express a concrete computational cost that can be measured as the amount of samples that are needed from the distribution that belongs to each node. The free energy principle therefore provides the normative basis for generalized optimality equations that account for both adversarial and stochastic environments.
* 10 pages, 2 figures
Bayesian Causal Induction
Nov 30, 2011
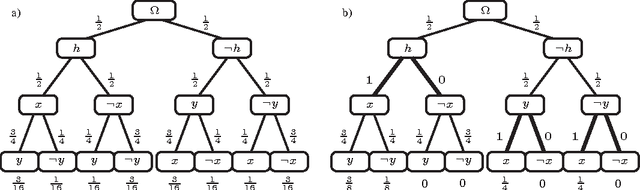
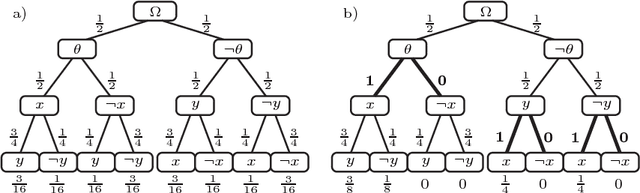
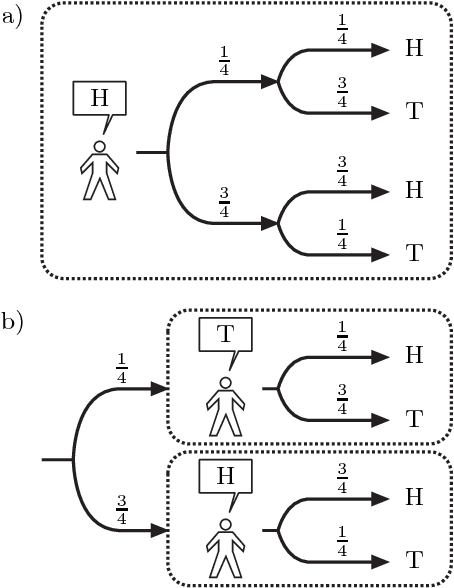
Discovering causal relationships is a hard task, often hindered by the need for intervention, and often requiring large amounts of data to resolve statistical uncertainty. However, humans quickly arrive at useful causal relationships. One possible reason is that humans extrapolate from past experience to new, unseen situations: that is, they encode beliefs over causal invariances, allowing for sound generalization from the observations they obtain from directly acting in the world. Here we outline a Bayesian model of causal induction where beliefs over competing causal hypotheses are modeled using probability trees. Based on this model, we illustrate why, in the general case, we need interventions plus constraints on our causal hypotheses in order to extract causal information from our experience.
Information, Utility & Bounded Rationality
Jul 28, 2011Perfectly rational decision-makers maximize expected utility, but crucially ignore the resource costs incurred when determining optimal actions. Here we employ an axiomatic framework for bounded rational decision-making based on a thermodynamic interpretation of resource costs as information costs. This leads to a variational "free utility" principle akin to thermodynamical free energy that trades off utility and information costs. We show that bounded optimal control solutions can be derived from this variational principle, which leads in general to stochastic policies. Furthermore, we show that risk-sensitive and robust (minimax) control schemes fall out naturally from this framework if the environment is considered as a bounded rational and perfectly rational opponent, respectively. When resource costs are ignored, the maximum expected utility principle is recovered.
* 10 pages. The original publication is available at www.springerlink.com
An axiomatic formalization of bounded rationality based on a utility-information equivalence
Jul 06, 2010

Classic decision-theory is based on the maximum expected utility (MEU) principle, but crucially ignores the resource costs incurred when determining optimal decisions. Here we propose an axiomatic framework for bounded decision-making that considers resource costs. Agents are formalized as probability measures over input-output streams. We postulate that any such probability measure can be assigned a corresponding conjugate utility function based on three axioms: utilities should be real-valued, additive and monotonic mappings of probabilities. We show that these axioms enforce a unique conversion law between utility and probability (and thereby, information). Moreover, we show that this relation can be characterized as a variational principle: given a utility function, its conjugate probability measure maximizes a free utility functional. Transformations of probability measures can then be formalized as a change in free utility due to the addition of new constraints expressed by a target utility function. Accordingly, one obtains a criterion to choose a probability measure that trades off the maximization of a target utility function and the cost of the deviation from a reference distribution. We show that optimal control, adaptive estimation and adaptive control problems can be solved this way in a resource-efficient way. When resource costs are ignored, the MEU principle is recovered. Our formalization might thus provide a principled approach to bounded rationality that establishes a close link to information theory.
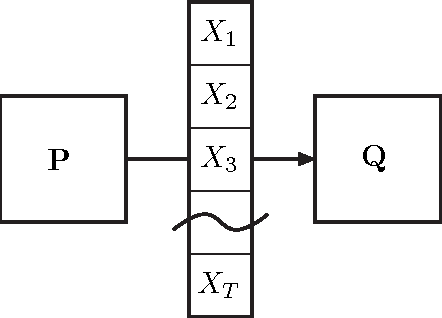
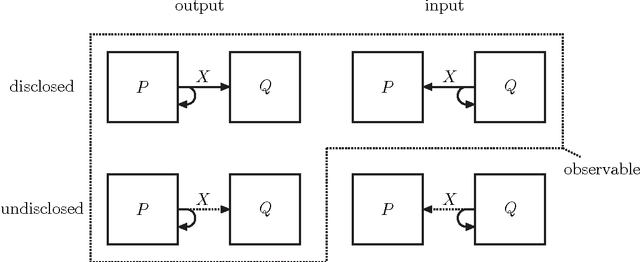
A Minimum Relative Entropy Principle for Learning and Acting
Apr 11, 2010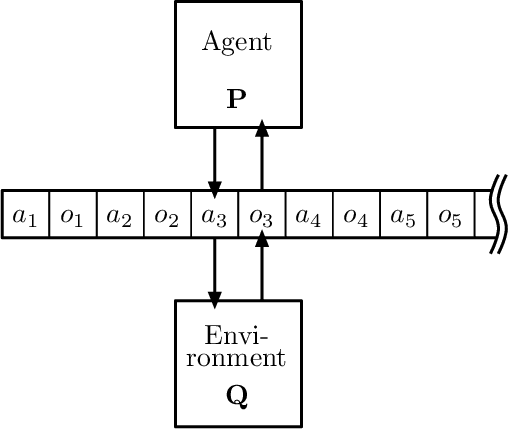
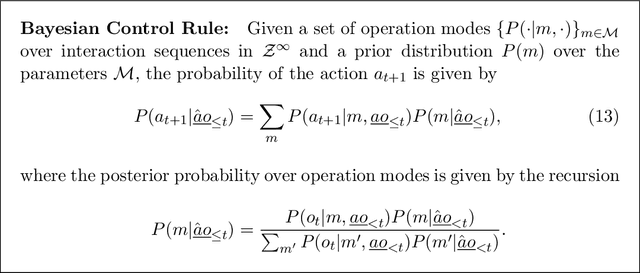
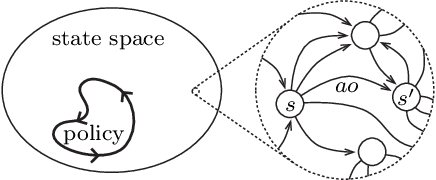
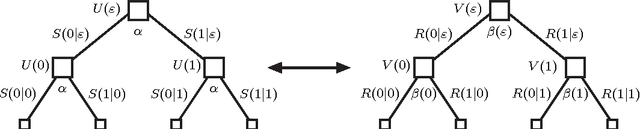
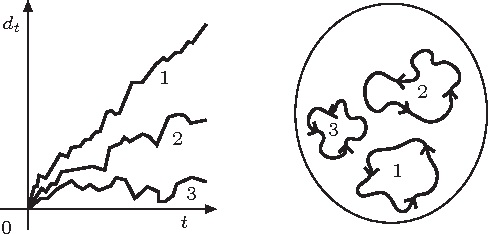
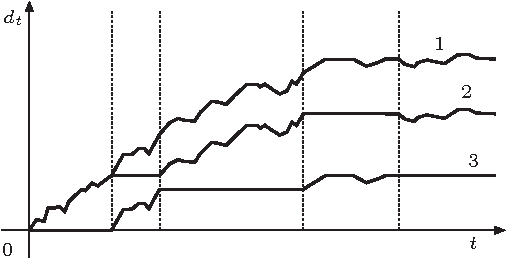
This paper proposes a method to construct an adaptive agent that is universal with respect to a given class of experts, where each expert is an agent that has been designed specifically for a particular environment. This adaptive control problem is formalized as the problem of minimizing the relative entropy of the adaptive agent from the expert that is most suitable for the unknown environment. If the agent is a passive observer, then the optimal solution is the well-known Bayesian predictor. However, if the agent is active, then its past actions need to be treated as causal interventions on the I/O stream rather than normal probability conditions. Here it is shown that the solution to this new variational problem is given by a stochastic controller called the Bayesian control rule, which implements adaptive behavior as a mixture of experts. Furthermore, it is shown that under mild assumptions, the Bayesian control rule converges to the control law of the most suitable expert.
Convergence of Bayesian Control Rule
Feb 16, 2010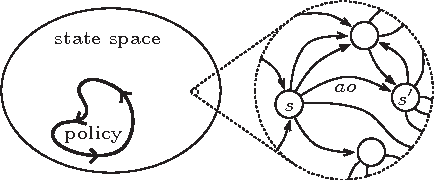
Recently, new approaches to adaptive control have sought to reformulate the problem as a minimization of a relative entropy criterion to obtain tractable solutions. In particular, it has been shown that minimizing the expected deviation from the causal input-output dependencies of the true plant leads to a new promising stochastic control rule called the Bayesian control rule. This work proves the convergence of the Bayesian control rule under two sufficient assumptions: boundedness, which is an ergodicity condition; and consistency, which is an instantiation of the sure-thing principle.
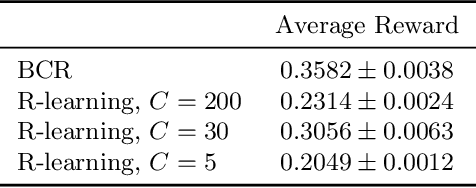
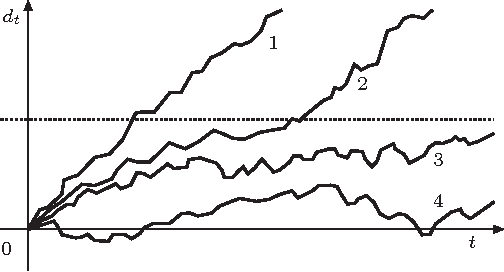
A Minimum Relative Entropy Controller for Undiscounted Markov Decision Processes
Feb 07, 2010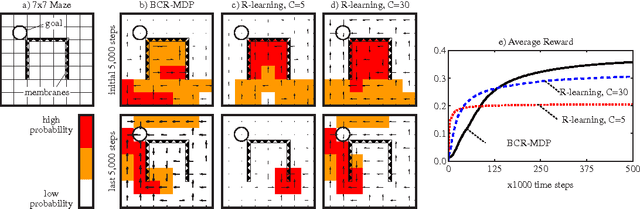
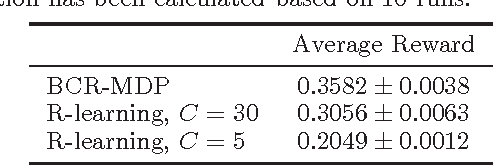
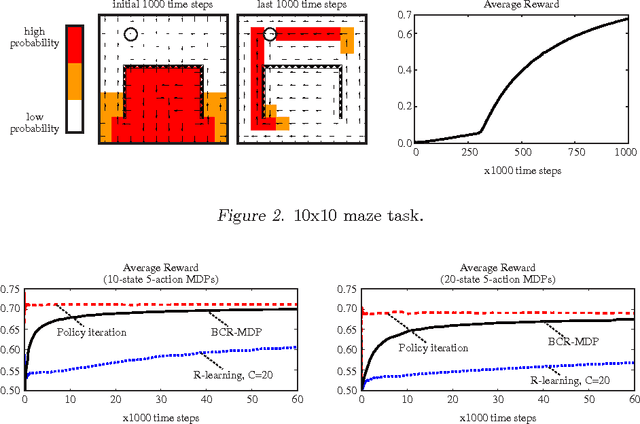
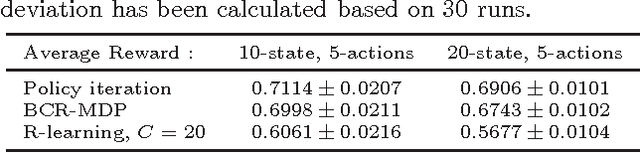
Adaptive control problems are notoriously difficult to solve even in the presence of plant-specific controllers. One way to by-pass the intractable computation of the optimal policy is to restate the adaptive control as the minimization of the relative entropy of a controller that ignores the true plant dynamics from an informed controller. The solution is given by the Bayesian control rule-a set of equations characterizing a stochastic adaptive controller for the class of possible plant dynamics. Here, the Bayesian control rule is applied to derive BCR-MDP, a controller to solve undiscounted Markov decision processes with finite state and action spaces and unknown dynamics. In particular, we derive a non-parametric conjugate prior distribution over the policy space that encapsulates the agent's whole relevant history and we present a Gibbs sampler to draw random policies from this distribution. Preliminary results show that BCR-MDP successfully avoids sub-optimal limit cycles due to its built-in mechanism to balance exploration versus exploitation.