 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopological Machine Learning with Unreduced Persistence Diagrams
Jul 09, 2025Supervised machine learning pipelines trained on features derived from persistent homology have been experimentally observed to ignore much of the information contained in a persistence diagram. Computing persistence diagrams is often the most computationally demanding step in such a pipeline, however. To explore this, we introduce several methods to generate topological feature vectors from unreduced boundary matrices. We compared the performance of pipelines trained on vectorizations of unreduced PDs to vectorizations of fully-reduced PDs across several data and task types. Our results indicate that models trained on PDs built from unreduced diagrams can perform on par and even outperform those trained on fully-reduced diagrams on some tasks. This observation suggests that machine learning pipelines which incorporate topology-based features may benefit in terms of computational cost and performance by utilizing information contained in unreduced boundary matrices.
Output Mode Switching for Parallel Five-bar Manipulators Using a Graph-based Path Planner
Sep 22, 2022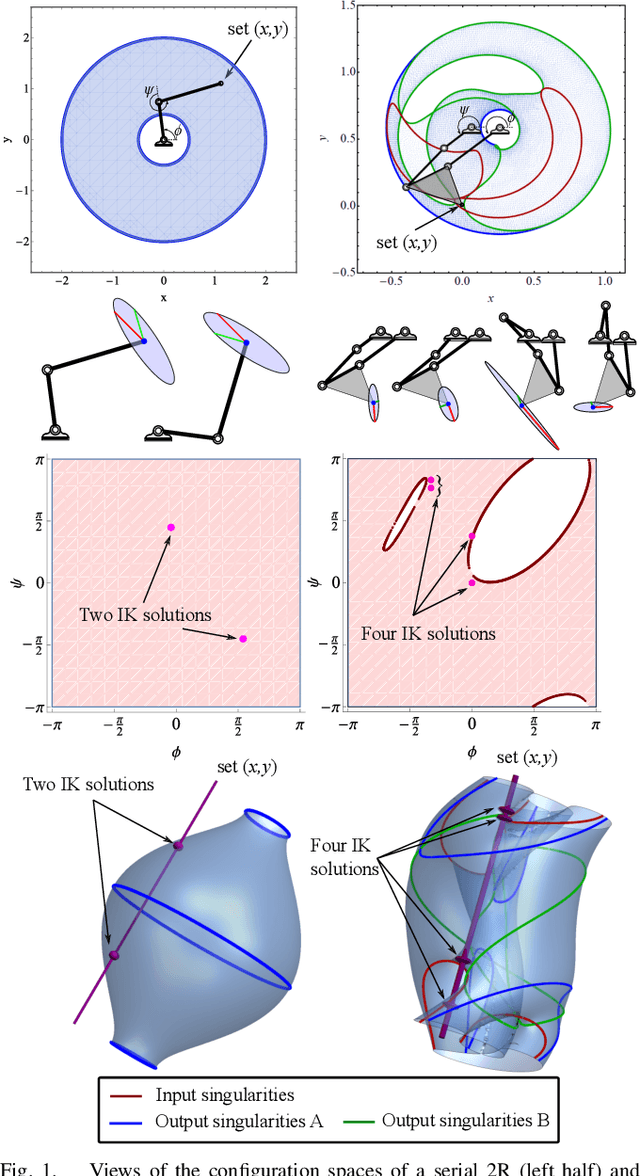
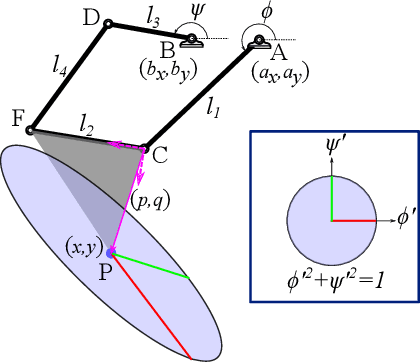
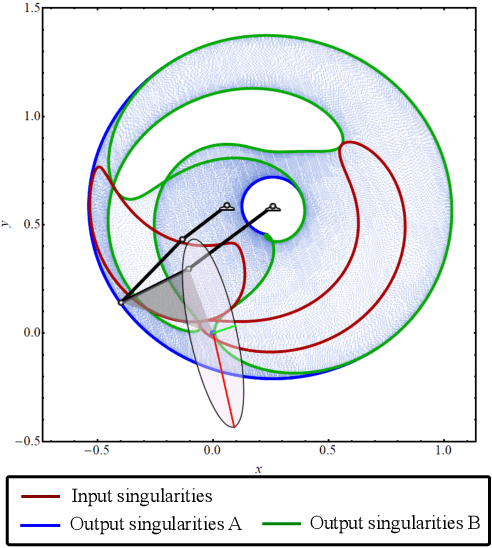
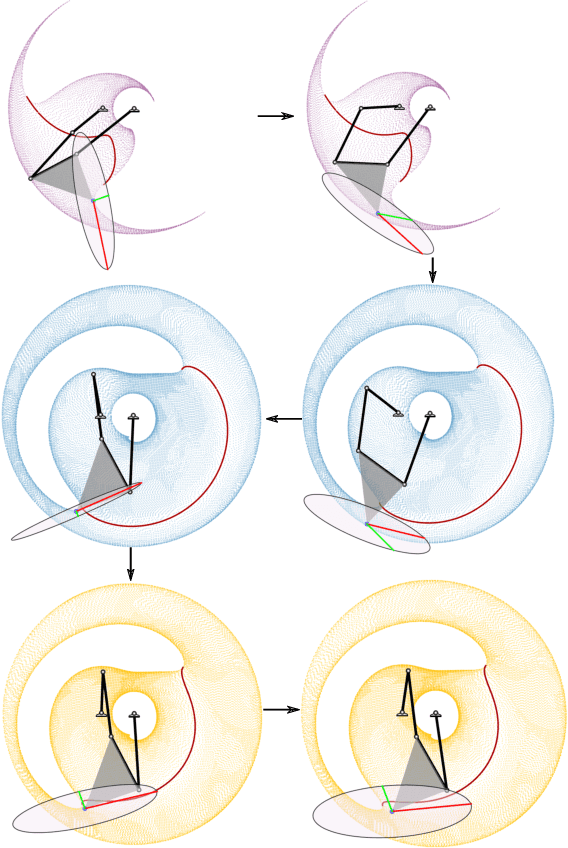
The configuration manifolds of parallel manipulators exhibit more nonlinearity than serial manipulators. Qualitatively, they can be seen to possess extra folds. By projecting such manifolds onto spaces of engineering relevance, such as an output workspace or an input actuator space, these folds cast edges that exhibit nonsmooth behavior. For example, inside the global workspace bounds of a five-bar linkage appear several local workspace bounds that only constrain certain output modes of the mechanism. The presence of such boundaries, which manifest in both input and output projections, serve as a source of confusion when these projections are studied exclusively instead of the configuration manifold itself. Particularly, the design of nonsymmetric parallel manipulators has been confounded by the presence of exotic projections in their input and output spaces. In this paper, we represent the configuration space with a radius graph, then weight each edge by solving an optimization problem using homotopy continuation to quantify transmission quality. We then employ a graph path planner to approximate geodesics between configuration points that avoid regions of low transmission quality. Our methodology automatically generates paths capable of transitioning between non-neighboring output modes, a motion which involves osculating multiple workspace boundaries (local, global, or both). We apply our technique to two nonsymmetric five-bar examples that demonstrate how transmission properties and other characteristics of the workspace can be selected by switching output modes.