 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLambdas at the Far Edge: a Tale of Flying Lambdas and Lambdas on Wheels
Mar 04, 2026Aggregate Programming (AP) is a paradigm for programming the collective behaviour of sets of distributed devices, possibly situated at the network far edge, by relying on asynchronous proximity-based interactions. The eXchange Calculus (XC), a recently proposed foundational model for AP, is essentially a typed lambda calculus extended with an operator (the exchange operator) providing an implicit communication mechanism between neighbour devices. This paper provides a gentle introduction to XC and to its implementation as a C++ library, called FCPP. The FCPP library and toolchain has been mainly developed at the Department of Computer Science of the University of Turin, where Stefano Berardi spent most of his academic career conducting outstanding research about logical foundation of computer science and transmitting his passion for research to students and young researchers, often exploiting typed lambda calculi. An FCCP program is essentially a typed lambda term, and FCPP has been used to write code that has been deployed on devices at the far edge of the network, including rovers and (soon) Uncrewed Aerial Vehicles (UAVs); hence the title of the paper.
* In Proceedings LTT 2026, arXiv:2603.02912
3D Map Reconstruction of an Orchard using an Angle-Aware Covering Control Strategy
Feb 06, 2022



In the last years, unmanned aerial vehicles are becoming a reality in the context of precision agriculture, mainly for monitoring, patrolling and remote sensing tasks, but also for 3D map reconstruction. In this paper, we present an innovative approach where a fleet of unmanned aerial vehicles is exploited to perform remote sensing tasks over an apple orchard for reconstructing a 3D map of the field, formulating the covering control problem to combine the position of a monitoring target and the viewing angle. Moreover, the objective function of the controller is defined by an importance index, which has been computed from a multi-spectral map of the field, obtained by a preliminary flight, using a semantic interpretation scheme based on a convolutional neural network. This objective function is then updated according to the history of the past coverage states, thus allowing the drones to take situation-adaptive actions. The effectiveness of the proposed covering control strategy has been validated through simulations on a Robot Operating System.
UAV and Machine Learning Based Refinement of a Satellite-Driven Vegetation Index for Precision Agriculture
Apr 29, 2020
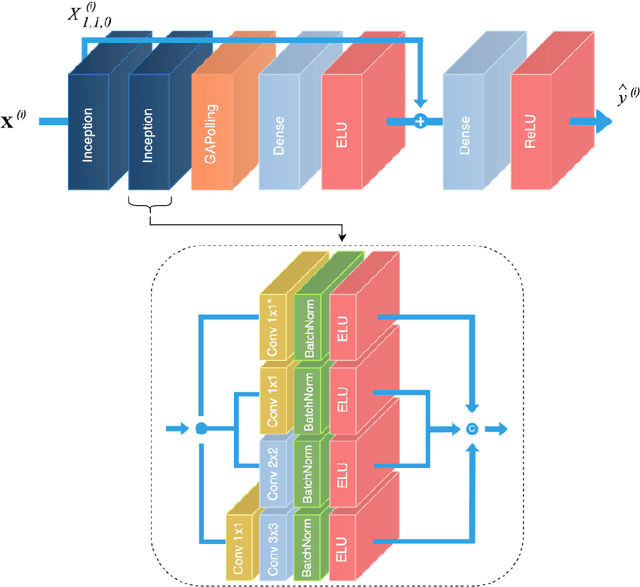
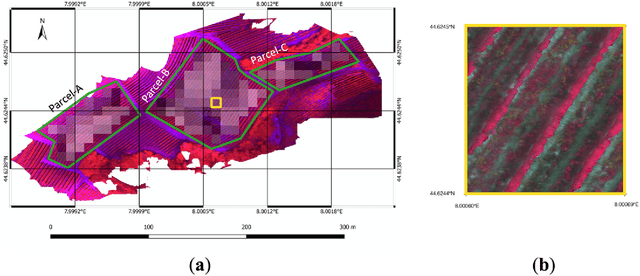
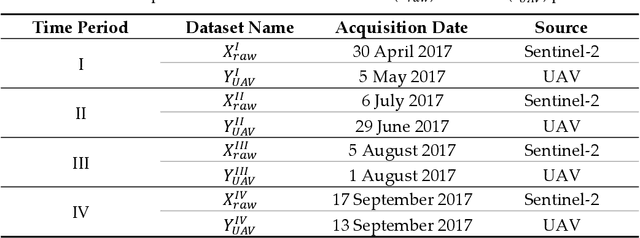
Precision agriculture is considered to be a fundamental approach in pursuing a low-input, high-efficiency, and sustainable kind of agriculture when performing site-specific management practices. To achieve this objective, a reliable and updated description of the local status of crops is required. Remote sensing, and in particular satellite-based imagery, proved to be a valuable tool in crop mapping, monitoring, and diseases assessment. However, freely available satellite imagery with low or moderate resolutions showed some limits in specific agricultural applications, e.g., where crops are grown by rows. Indeed, in this framework, the satellite's output could be biased by intra-row covering, giving inaccurate information about crop status. This paper presents a novel satellite imagery refinement framework, based on a deep learning technique which exploits information properly derived from high resolution images acquired by unmanned aerial vehicle (UAV) airborne multispectral sensors. To train the convolutional neural network, only a single UAV-driven dataset is required, making the proposed approach simple and cost-effective. A vineyard in Serralunga d'Alba (Northern Italy) was chosen as a case study for validation purposes. Refined satellite-driven normalized difference vegetation index (NDVI) maps, acquired in four different periods during the vine growing season, were shown to better describe crop status with respect to raw datasets by correlation analysis and ANOVA. In addition, using a K-means based classifier, 3-class vineyard vigor maps were profitably derived from the NDVI maps, which are a valuable tool for growers.