 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePublic Acceptance of Cybernetic Avatars in the service sector: Evidence from a Large-Scale Survey in Dubai
Jun 17, 2025



Cybernetic avatars are hybrid interaction robots or digital representations that combine autonomous capabilities with teleoperated control. This study investigates the acceptance of cybernetic avatars in the highly multicultural society of Dubai, with particular emphasis on robotic avatars for customer service. Specifically, we explore how acceptance varies as a function of robot appearance (e.g., android, robotic-looking, cartoonish), deployment settings (e.g., shopping malls, hotels, hospitals), and functional tasks (e.g., providing information, patrolling). To this end, we conducted a large-scale survey with over 1,000 participants. Overall, cybernetic avatars received a high level of acceptance, with physical robot avatars receiving higher acceptance than digital avatars. In terms of appearance, robot avatars with a highly anthropomorphic robotic appearance were the most accepted, followed by cartoonish designs and androids. Animal-like appearances received the lowest level of acceptance. Among the tasks, providing information and guidance was rated as the most valued. Shopping malls, airports, public transport stations, and museums were the settings with the highest acceptance, whereas healthcare-related spaces received lower levels of support. An analysis by community cluster revealed among others that Emirati respondents showed significantly greater acceptance of android appearances compared to the overall sample, while participants from the 'Other Asia' cluster were significantly more accepting of cartoonish appearances. Our study underscores the importance of incorporating citizen feedback into the design and deployment of cybernetic avatars from the early stages to enhance acceptance of this technology in society.
Towards a Computed-Aided Diagnosis System in Colonoscopy: Automatic Polyp Segmentation Using Convolution Neural Networks
Jan 15, 2021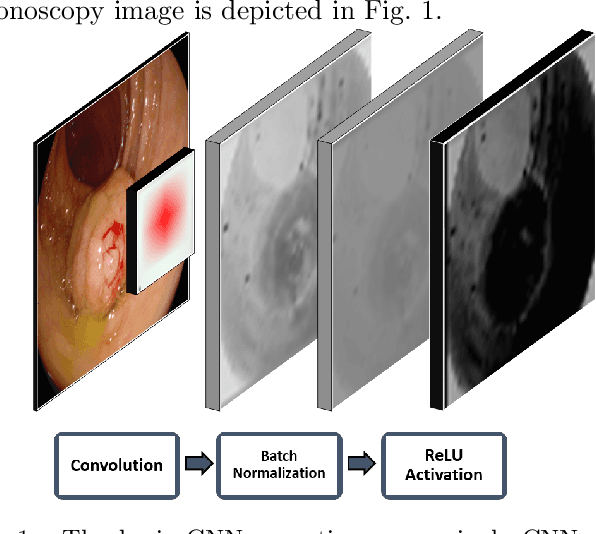
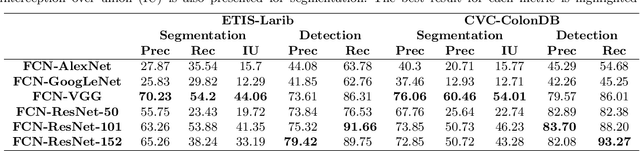
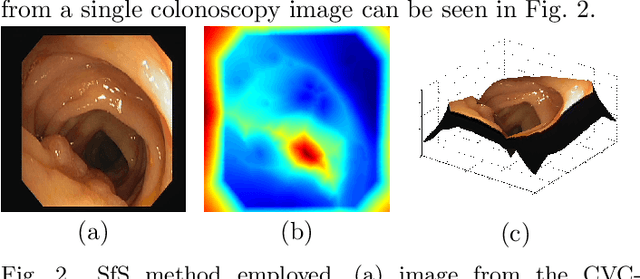

Early diagnosis is essential for the successful treatment of bowel cancers including colorectal cancer (CRC) and capsule endoscopic imaging with robotic actuation can be a valuable diagnostic tool when combined with automated image analysis. We present a deep learning rooted detection and segmentation framework for recognizing lesions in colonoscopy and capsule endoscopy images. We restructure established convolution architectures, such as VGG and ResNets, by converting them into fully-connected convolution networks (FCNs), fine-tune them and study their capabilities for polyp segmentation and detection. We additionally use Shape from-Shading (SfS) to recover depth and provide a richer representation of the tissue's structure in colonoscopy images. Depth is incorporated into our network models as an additional input channel to the RGB information and we demonstrate that the resulting network yields improved performance. Our networks are tested on publicly available datasets and the most accurate segmentation model achieved a mean segmentation IU of 47.78% and 56.95% on the ETIS-Larib and CVC-Colon datasets, respectively. For polyp detection, the top performing models we propose surpass the current state of the art with detection recalls superior to 90% for all datasets tested. To our knowledge, we present the first work to use FCNs for polyp segmentation in addition to proposing a novel combination of SfS and RGB that boosts performance
* 10 pages, 6 figures