 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinetostatic Analysis and Solution Classification of a Planar Tensegrity Mechanism
May 23, 2017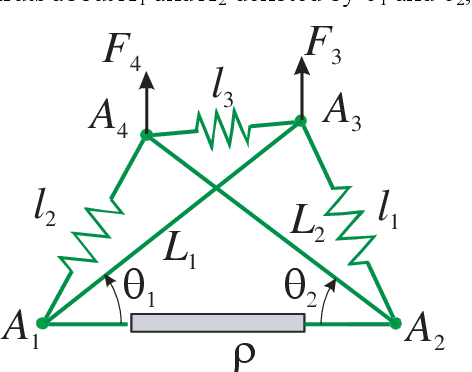
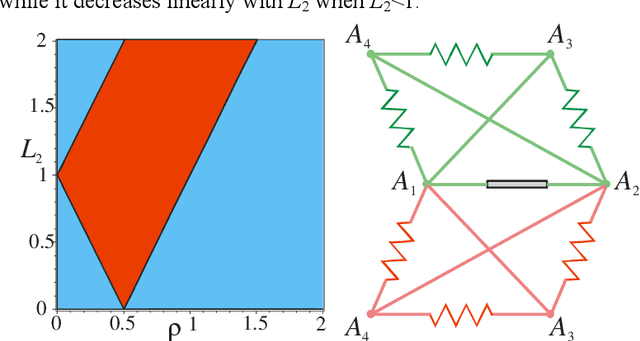
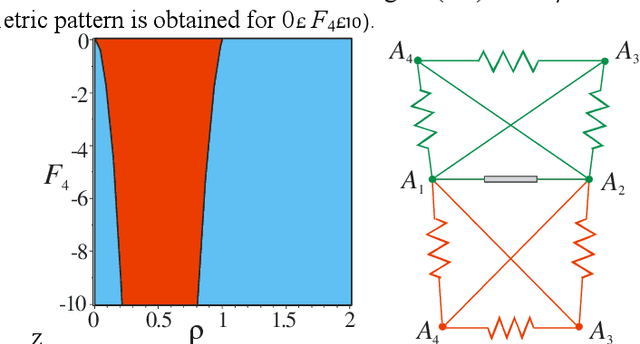
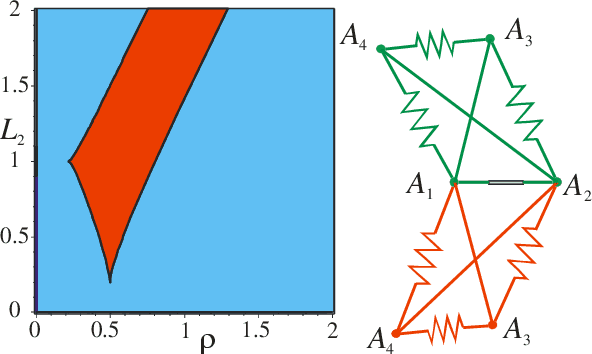
Tensegrity mechanisms have several interesting properties that make them suitable for a number of applications. Their analysis is generally challenging because the static equilibrium conditions often result in complex equations. A class of planar one-degree-of-freedom (dof) tensegrity mechanisms with three linear springs is analyzed in detail in this paper. The kinetostatic equations are derived and solved under several loading and geometric conditions. It is shown that these mechanisms exhibit up to six equilibrium configurations, of which one or two are stable. Discriminant varieties and cylindrical algebraic decomposition combined with Groebner base elimination are used to classify solutions as function of the input parameters.
Kinematic Analysis and Trajectory Planning of the Orthoglide 5-axis
May 26, 2015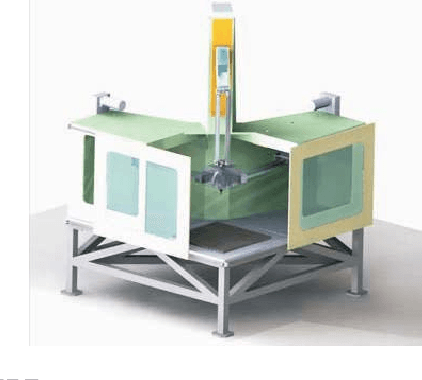
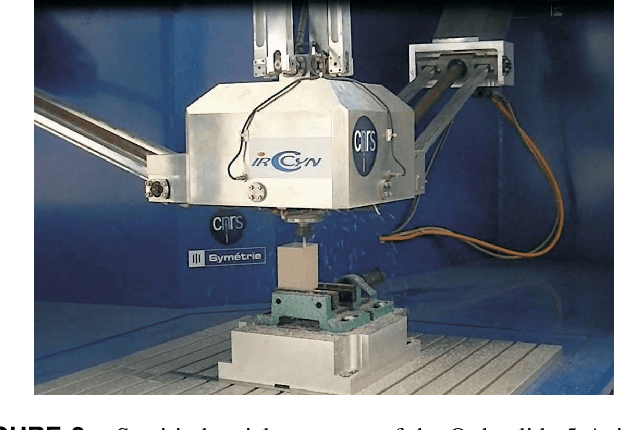
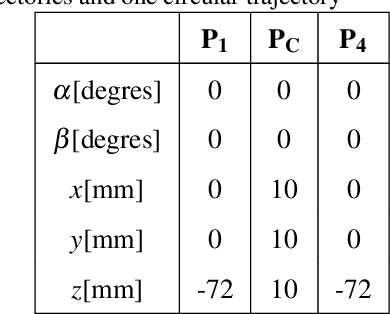
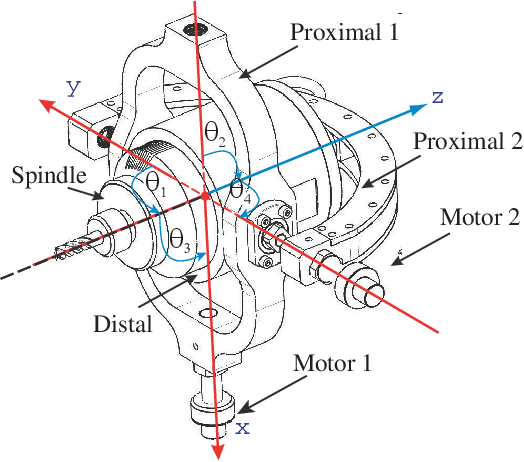
The subject of this paper is about the kinematic analysis and the trajectory planning of the Orthoglide 5-axis. The Orthoglide 5-axis a five degrees of freedom parallel kinematic machine developed at IRCCyN and is made up of a hybrid architecture, namely, a three degrees of freedom translational parallel manip-ulator mounted in series with a two degrees of freedom parallel spherical wrist. The simpler the kinematic modeling of the Or-thoglide 5-axis, the higher the maximum frequency of its control loop. Indeed, the control loop of a parallel kinematic machine should be computed with a high frequency, i.e., higher than 1.5 MHz, in order the manipulator to be able to reach high speed motions with a good accuracy. Accordingly, the direct and inverse kinematic models of the Orthoglide 5-axis, its inverse kine-matic Jacobian matrix and the first derivative of the latter with respect to time are expressed in this paper. It appears that the kinematic model of the manipulator under study can be written in a quadratic form due to the hybrid architecture of the Orthoglide 5-axis. As illustrative examples, the profiles of the actuated joint angles (lengths), velocities and accelerations that are used in the control loop of the robot are traced for two test trajectories.