 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegration of Multi-Mode Preference into Home Energy Management System Using Deep Reinforcement Learning
May 02, 2025Home Energy Management Systems (HEMS) have emerged as a pivotal tool in the smart home ecosystem, aiming to enhance energy efficiency, reduce costs, and improve user comfort. By enabling intelligent control and optimization of household energy consumption, HEMS plays a significant role in bridging the gap between consumer needs and energy utility objectives. However, much of the existing literature construes consumer comfort as a mere deviation from the standard appliance settings. Such deviations are typically incorporated into optimization objectives via static weighting factors. These factors often overlook the dynamic nature of consumer behaviors and preferences. Addressing this oversight, our paper introduces a multi-mode Deep Reinforcement Learning-based HEMS (DRL-HEMS) framework, meticulously designed to optimize based on dynamic, consumer-defined preferences. Our primary goal is to augment consumer involvement in Demand Response (DR) programs by embedding dynamic multi-mode preferences tailored to individual appliances. In this study, we leverage a model-free, single-agent DRL algorithm to deliver a HEMS framework that is not only dynamic but also user-friendly. To validate its efficacy, we employed real-world data at 15-minute intervals, including metrics such as electricity price, ambient temperature, and appliances' power consumption. Our results show that the model performs exceptionally well in optimizing energy consumption within different preference modes. Furthermore, when compared to traditional algorithms based on Mixed-Integer Linear Programming (MILP), our model achieves nearly optimal performance while outperforming in computational efficiency.
Attack-resilient observer pruning for path-tracking control of Wheeled Mobile Robot
Sep 07, 2020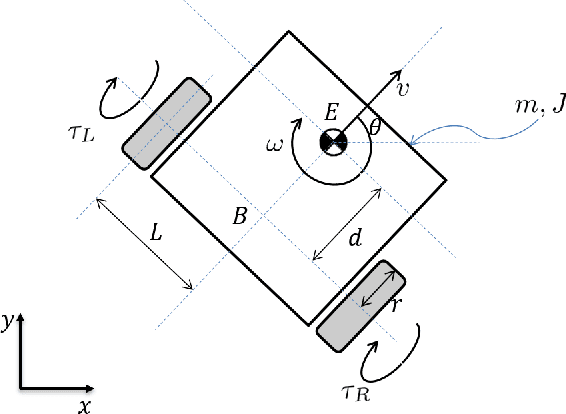
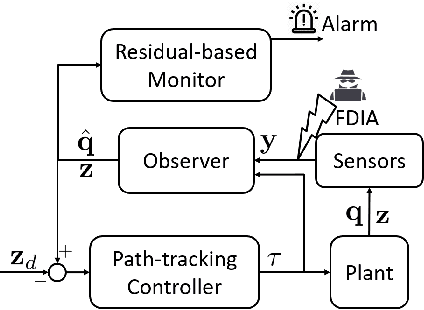
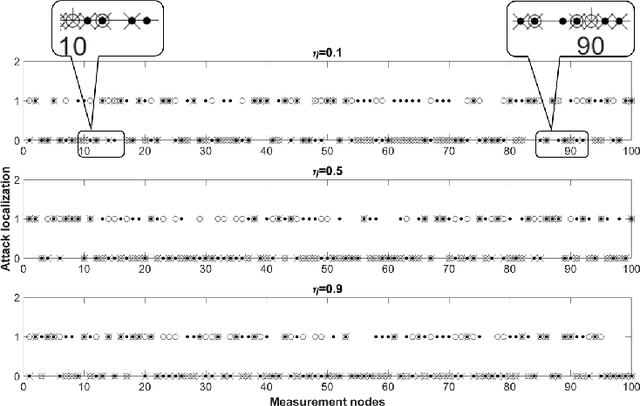
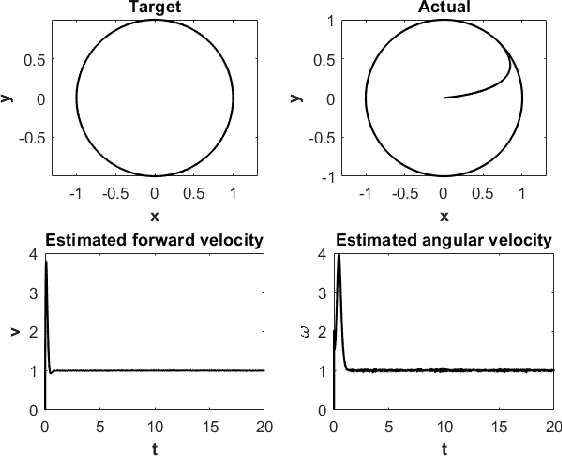
Path-tracking control of wheeled mobile robot (WMR) has gained a lot of research attention, primarily because of its wide applicability -- for example intelligent wheelchairs, exploration-assistant remote WMR. Recent increase in remote and autonomous operations\requirements for WMR has led to more and more use of IoT devices within the control loop. Consequently, providing interfaces for malicious interactions through false data injection attacks (FDIA). Moreover, optimization-based FDIAs have been shown to cause catastrophic consequences in feedback control systems while by-passing any residual-based monitoring system. Since these attacks target system measurement process, this paper focuses on the problem of improving the resiliency of dynamical observers against FDIA. Specifically, we propose an attack-resilient pruning algorithm which attempts to exclude compromised channels from being processed by the observer. The proposed pruning algorithm improves attack-localization precision to $100\%$ with high probability, which correspondingly improves the resiliency of the underlying UKF to FDIA. The improvements due to the developed resilient pruning-based observer is validated through a numerical simulation of a two-layer path-tracking control platform of differential-driven wheeled mobile robot (DDWMR) under FDIA.