 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMachine Learning-Based Real-Time Detection of Compensatory Trunk Movements Using Trunk-Wrist Inertial Measurement Units
Apr 14, 2026Compensatory trunk movements (CTMs) are commonly observed after stroke and can lead to maladaptive movement patterns, limiting targeted training of affected structures. Objective, continuous detection of CTMs during therapy and activities of daily living remains challenging due to the typically complex measurements setups required, as well as limited applicability for real-time use. This study investigates whether a two-inertial measurement unit configuration enables reliable, real-time CTM detection using machine learning. Data were collected from ten able-bodied participants performing activities of daily living under simulated impairment conditions (elbow brace restricting flexion-extension, resistance band inducing flexor-synergy-like patterns), with synchronized optical motion capture (OMC) and manually annotated video recordings serving as reference. A systematic location-reduction analysis using OMC identified wrist and trunk kinematics as a minimal yet sufficient set of anatomical sensing locations. Using an extreme gradient boosting classifier (XGBoost) evaluated with leave-one-subject-out cross-validation, our two-IMU model achieved strong discriminative performance (macro-F1 = 0.80 +/- 0.07, MCC = 0.73 +/- 0.08; ROC-AUC > 0.93), with performance comparable to an OMC-based model and prediction timing suitable for real-time applications. Explainability analysis revealed dominant contributions from trunk dynamics and wrist-trunk interaction features. In preliminary evaluation using recordings from four participants with neurological conditions, the model retained good discriminative capability (ROC-AUC ~ 0.78), but showed reduced and variable threshold-dependent performance, highlighting challenges in clinical generalization. These results support sparse wearable sensing as a viable pathway toward scalable, real-time monitoring of CTMs during therapy and daily living.
Differentiable Biomechanics for Markerless Motion Capture in Upper Limb Stroke Rehabilitation: A Comparison with Optical Motion Capture
Nov 22, 2024



Marker-based Optical Motion Capture (OMC) paired with biomechanical modeling is currently considered the most precise and accurate method for measuring human movement kinematics. However, combining differentiable biomechanical modeling with Markerless Motion Capture (MMC) offers a promising approach to motion capture in clinical settings, requiring only minimal equipment, such as synchronized webcams, and minimal effort for data collection. This study compares key kinematic outcomes from biomechanically modeled MMC and OMC data in 15 stroke patients performing the drinking task, a functional task recommended for assessing upper limb movement quality. We observed a high level of agreement in kinematic trajectories between MMC and OMC, as indicated by high correlations (median r above 0.95 for the majority of kinematic trajectories) and median RMSE values ranging from 2-5 degrees for joint angles, 0.04 m/s for end-effector velocity, and 6 mm for trunk displacement. Trial-to-trial biases between OMC and MMC were consistent within participant sessions, with interquartile ranges of bias around 1-3 degrees for joint angles, 0.01 m/s in end-effector velocity, and approximately 3mm for trunk displacement. Our findings indicate that our MMC for arm tracking is approaching the accuracy of marker-based methods, supporting its potential for use in clinical settings. MMC could provide valuable insights into movement rehabilitation in stroke patients, potentially enhancing the effectiveness of rehabilitation strategies.
Exoskeleton Knee Compliance Improves Gait Velocity and Stability in a Spinal Cord Injured User: A Case Report
Oct 31, 2019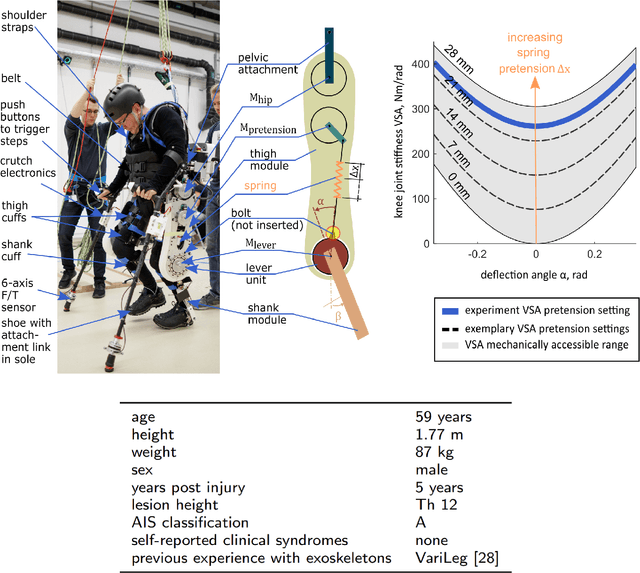
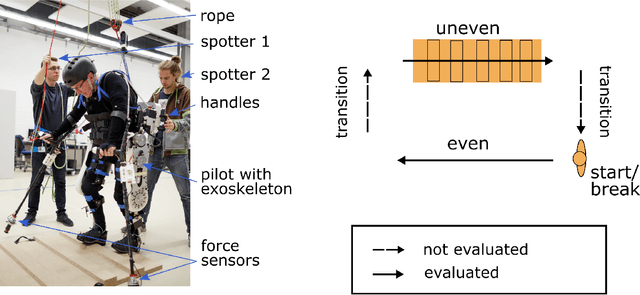
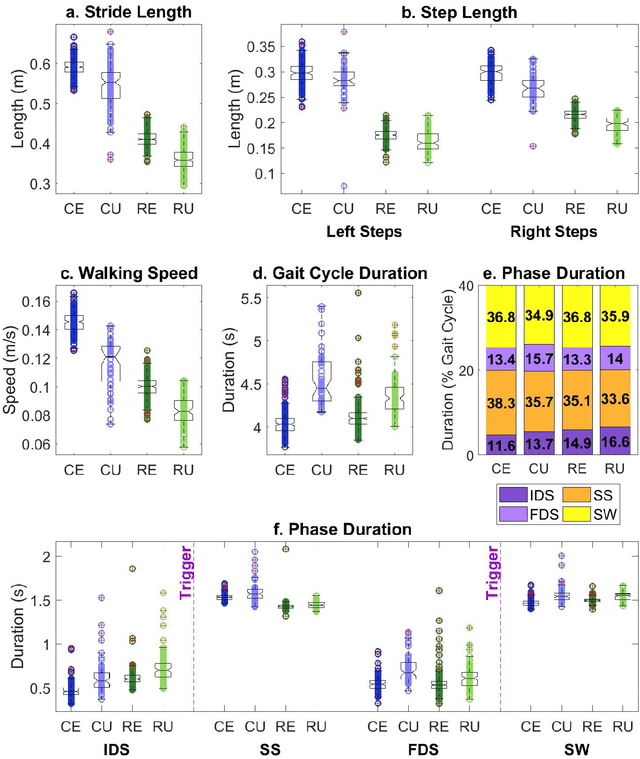
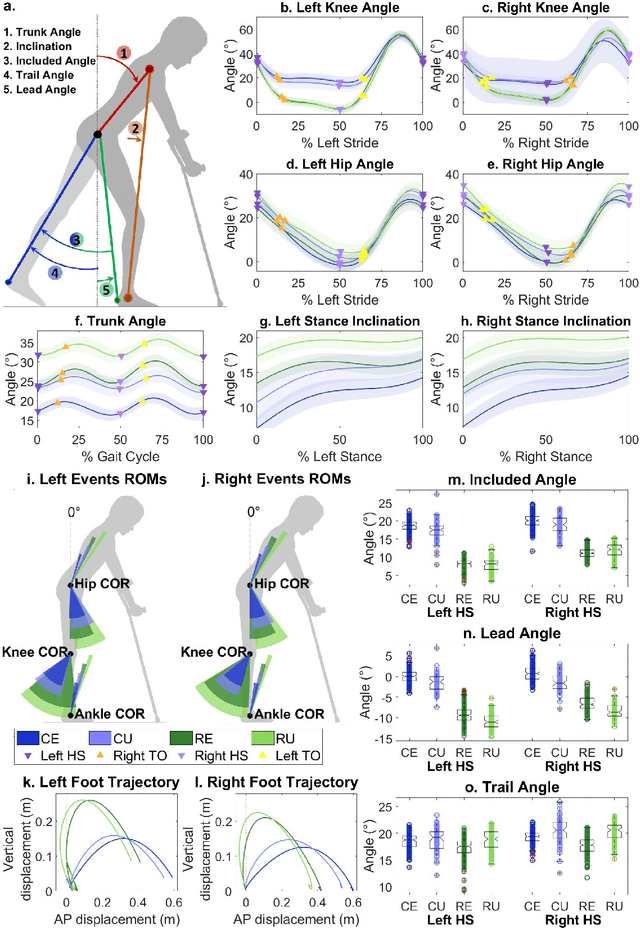
Spinal cord injuries frequently impair the ability to walk. Powered lower limb exoskeletons offer a promising solution to restore walking ability. However, they are currently restricted to even ground. We hypothesized that compliant exoskeleton knees could decrease required effort to maneuver on uneven terrain, and increase gait velocity and stability. We describe a case study of a motor-complete spinal cord injury user (AIS A, Th12) walking with a powered exoskeleton on even and uneven ground over multiple sessions after extensive training. Measurements with compliant or rigid exoskeleton knee joints were performed on three different days for each configuration. Body motion and crutch ground interaction forces were recorded to assess gait performance. We observed higher walking speeds with a compliant exoskeleton knee configuration (mean: 0.116 m/s on uneven and 0.145 m/s on even ground) compared to a rigid configuration (mean: 0.083 m/s and 0.100 m/s). Crutch force impulse was significantly reduced in the compliant configuration. Lastly, gait was more symmetric when the knee joints were compliant. In conclusion, compliant exoskeleton knee joints can help maneuver uneven ground faster and with less user effort than rigid joints. Based on our findings, exoskeleton designers should consider introducing compliance into their design to increase gait robustness and performance, and render exoskeletons more suitable for daily life use.