 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe, Fluent and Acceptable Motion Generation and Execution for Human--Robot Interaction in Manufacturing Environments
Jun 07, 2026Robots operating in human environments must not only ensure physical safety but also exhibit behaviors that are understandable, fluent, and acceptable to human partners. This paper investigates motion generation strategies that combine safety guarantees with interaction quality considerations, such as motion smoothness and human comfort. While the design of robots capable of ensuring safety in shared human-robot environments has enabled closer and more advanced forms of interaction, these new proximity-based tasks require moving beyond purely technical considerations. In particular, robot behavior must also be addressed from psycho-cognitive and social perspectives. In this context, we argue for the relevance of integrating social-aware motion control into robotic systems. First, we identify the motion parameters that influence human perception and operator experience. Then, we implement a Model Predictive Control (MPC) framework that generates four distinct socially-informed robot behaviors. Finally, we conduct a user study to evaluate and validate these behaviors and assess their social impact on non-expert participants. The results demonstrate that variations in robot behavior significantly affect the perceived social acceptability of the system. These findings highlight the importance of incorporating human-centered considerations into motion generation strategies for robots operating in shared environments.
Learning to automatically detect features for mobile robots using second-order Hidden Markov Models
Jan 24, 2005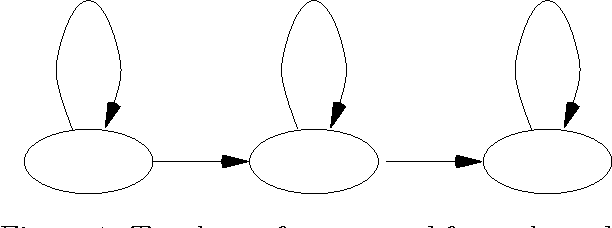
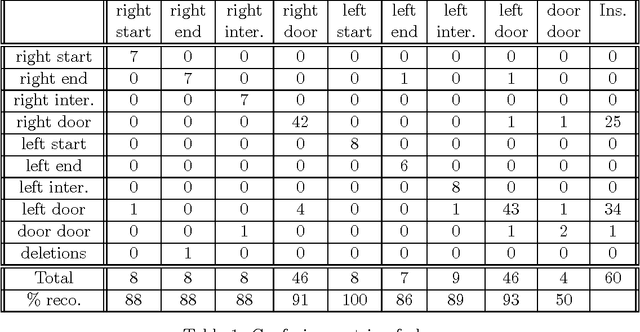
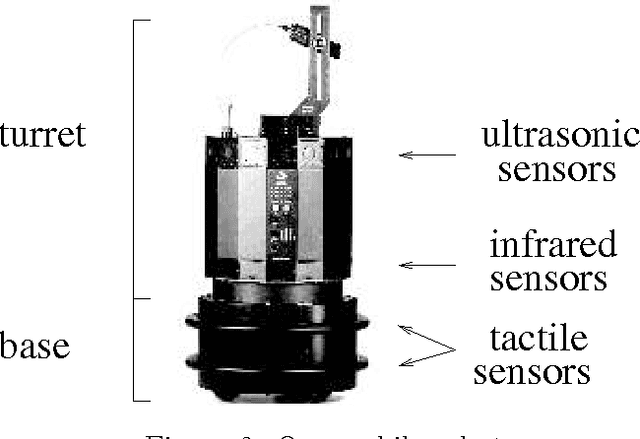
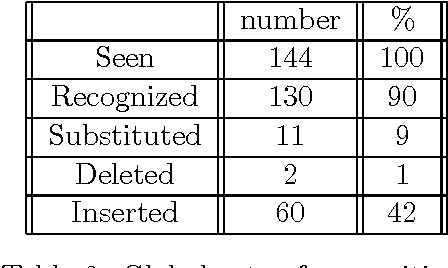
In this paper, we propose a new method based on Hidden Markov Models to interpret temporal sequences of sensor data from mobile robots to automatically detect features. Hidden Markov Models have been used for a long time in pattern recognition, especially in speech recognition. Their main advantages over other methods (such as neural networks) are their ability to model noisy temporal signals of variable length. We show in this paper that this approach is well suited for interpretation of temporal sequences of mobile-robot sensor data. We present two distinct experiments and results: the first one in an indoor environment where a mobile robot learns to detect features like open doors or T-intersections, the second one in an outdoor environment where a different mobile robot has to identify situations like climbing a hill or crossing a rock.