 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBehavioral Data-Driven Optimal Trajectory Generation for Rotary Cranes
May 14, 2026With the growth of the construction industry and the global shortage of skilled labor, the automation of crane control has become increasingly important for safe and efficient operations. A central challenge in automatic crane control is the reduction of load oscillations during motion, which is primarily addressed through appropriate slewing trajectories. In this context, classical model-based control methods rely on accurate dynamical models and expert tuning, and often struggle to meet safety and precision requirements, while many learning-based approaches require large data sets and significant computational resources. This paper proposes a behavioral data-driven framework for generating open-loop slewing trajectories for rotary cranes that suppress load sway while reducing operation time and energy consumption. The approach builds on Willems' fundamental lemma and its generalizations, to bypass explicit system modeling and operate directly on measured input-output data. A practical workflow is presented in this paper to reduce the need for expert knowledge. Despite the underactuated nature of the crane dynamics, the method identifies a nonparametric representation of the system behavior and generates smooth, optimal trajectories using limited data and convex optimization. The proposed trajectory generation method is validated on a laboratory crane setup and compared against an established model-based approach, achieving up to 35% reduction in load sway, 43% reduction in tracking error, and 50% reduction in travel time.
Bladder Vessel Segmentation using a Hybrid Attention-Convolution Framework
Feb 10, 2026Urinary bladder cancer surveillance requires tracking tumor sites across repeated interventions, yet the deformable and hollow bladder lacks stable landmarks for orientation. While blood vessels visible during endoscopy offer a patient-specific "vascular fingerprint" for navigation, automated segmentation is challenged by imperfect endoscopic data, including sparse labels, artifacts like bubbles or variable lighting, continuous deformation, and mucosal folds that mimic vessels. State-of-the-art vessel segmentation methods often fail to address these domain-specific complexities. We introduce a Hybrid Attention-Convolution (HAC) architecture that combines Transformers to capture global vessel topology prior with a CNN that learns a residual refinement map to precisely recover thin-vessel details. To prioritize structural connectivity, the Transformer is trained on optimized ground truth data that exclude short and terminal branches. Furthermore, to address data scarcity, we employ a physics-aware pretraining, that is a self-supervised strategy using clinically grounded augmentations on unlabeled data. Evaluated on the BlaVeS dataset, consisting of endoscopic video frames, our approach achieves high accuracy (0.94) and superior precision (0.61) and clDice (0.66) compared to state-of-the-art medical segmentation models. Crucially, our method successfully suppresses false positives from mucosal folds that dynamically appear and vanish as the bladder fills and empties during surgery. Hence, HAC provides the reliable structural stability required for clinical navigation.
Efficient Online Trajectory Planning for Integrator Chain Dynamics using Polynomial Elimination
Dec 13, 2020
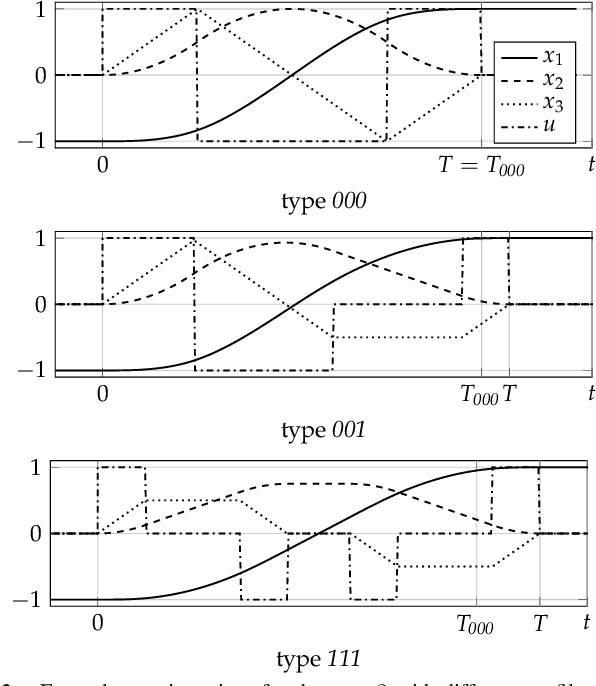
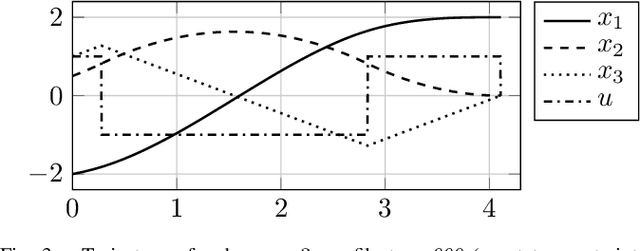
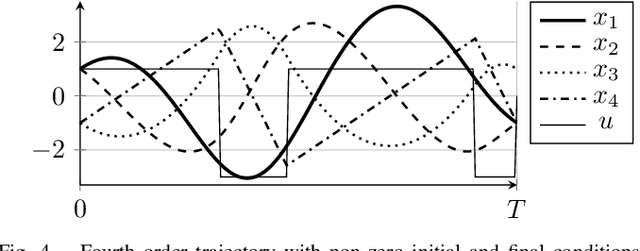
Providing smooth reference trajectories can effectively increase performance and accuracy of tracking control applications while overshoot and unwanted vibrations are reduced. Trajectory planning computations can often be simplified significantly by transforming the system dynamics into decoupled integrator chains using methods such as feedback linearization, differential flatness or the controller canonical form. We present an efficient method to plan time optimal trajectories for integrator chains subject to derivative bound constraints. Therefore, an algebraic precomputation algorithm formulates the necessary conditions for time optimality in form of a set of polynomial systems, followed by a symbolic polynomial elimination using Gr\"obner bases. A fast online algorithm then plans the trajectories by calculating the roots of the decomposed polynomial systems. These roots describe the switching time instants of the input signal and the full trajectory simply follows by multiple integration. This method presents a systematic way to compute time optimal trajectories exactly via algebraic calculations without numerical approximation iterations. It is applied to various trajectory types with different continuity order, asymmetric derivative bounds and non-rest initial and final states.