 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuromorphic Eye Tracking for Low-Latency Pupil Detection
Dec 10, 2025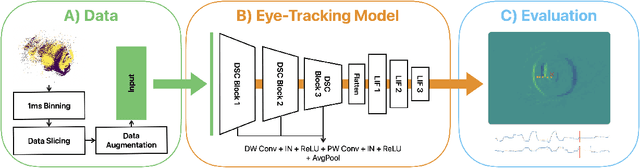
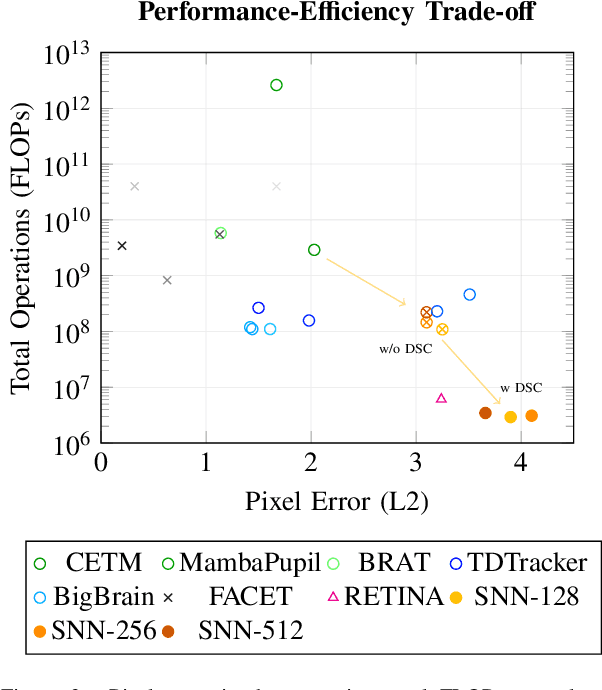
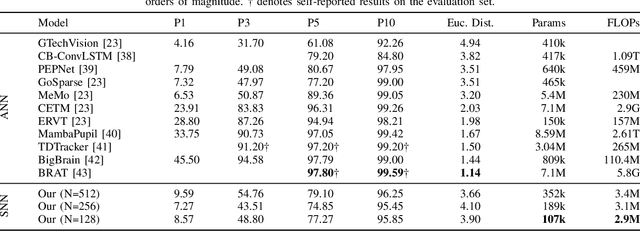
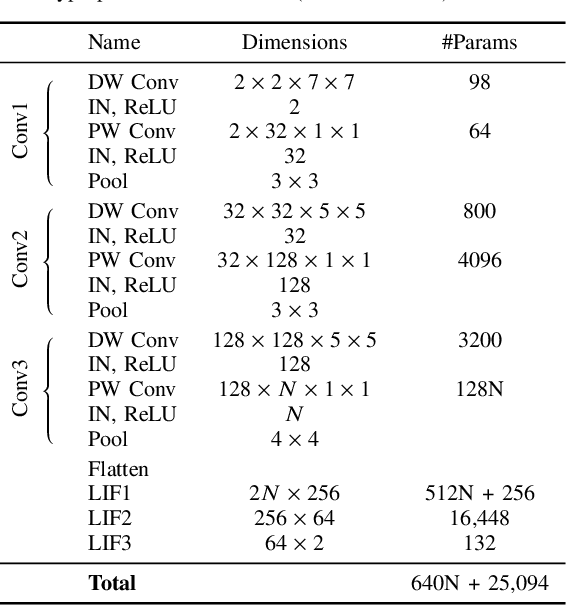
Eye tracking for wearable systems demands low latency and milliwatt-level power, but conventional frame-based pipelines struggle with motion blur, high compute cost, and limited temporal resolution. Such capabilities are vital for enabling seamless and responsive interaction in emerging technologies like augmented reality (AR) and virtual reality (VR), where understanding user gaze is key to immersion and interface design. Neuromorphic sensors and spiking neural networks (SNNs) offer a promising alternative, yet existing SNN approaches are either too specialized or fall short of the performance of modern ANN architectures. This paper presents a neuromorphic version of top-performing event-based eye-tracking models, replacing their recurrent and attention modules with lightweight LIF layers and exploiting depth-wise separable convolutions to reduce model complexity. Our models obtain 3.7-4.1px mean error, approaching the accuracy of the application-specific neuromorphic system, Retina (3.24px), while reducing model size by 20x and theoretical compute by 850x, compared to the closest ANN variant of the proposed model. These efficient variants are projected to operate at an estimated 3.9-4.9 mW with 3 ms latency at 1 kHz. The present results indicate that high-performing event-based eye-tracking architectures can be redesigned as SNNs with substantial efficiency gains, while retaining accuracy suitable for real-time wearable deployment.
Hyperdimensional Decoding of Spiking Neural Networks
Nov 12, 2025This work presents a novel spiking neural network (SNN) decoding method, combining SNNs with Hyperdimensional computing (HDC). The goal is to create a decoding method with high accuracy, high noise robustness, low latency and low energy usage. Compared to analogous architectures decoded with existing approaches, the presented SNN-HDC model attains generally better classification accuracy, lower classification latency and lower estimated energy consumption on multiple test cases from literature. The SNN-HDC achieved estimated energy consumption reductions ranging from 1.24x to 3.67x on the DvsGesture dataset and from 1.38x to 2.27x on the SL-Animals-DVS dataset. The presented decoding method can also efficiently identify unknown classes it has not been trained on. In the DvsGesture dataset the SNN-HDC model can identify 100% of samples from an unseen/untrained class. Given the numerous benefits shown and discussed in this paper, this decoding method represents a very compelling alternative to both rate and latency decoding.
Learning Long Sequences in Spiking Neural Networks
Dec 14, 2023Spiking neural networks (SNNs) take inspiration from the brain to enable energy-efficient computations. Since the advent of Transformers, SNNs have struggled to compete with artificial networks on modern sequential tasks, as they inherit limitations from recurrent neural networks (RNNs), with the added challenge of training with non-differentiable binary spiking activations. However, a recent renewed interest in efficient alternatives to Transformers has given rise to state-of-the-art recurrent architectures named state space models (SSMs). This work systematically investigates, for the first time, the intersection of state-of-the-art SSMs with SNNs for long-range sequence modelling. Results suggest that SSM-based SNNs can outperform the Transformer on all tasks of a well-established long-range sequence modelling benchmark. It is also shown that SSM-based SNNs can outperform current state-of-the-art SNNs with fewer parameters on sequential image classification. Finally, a novel feature mixing layer is introduced, improving SNN accuracy while challenging assumptions about the role of binary activations in SNNs. This work paves the way for deploying powerful SSM-based architectures, such as large language models, to neuromorphic hardware for energy-efficient long-range sequence modelling.
Spiking Associative Memory for Spatio-Temporal Patterns
Jun 30, 2020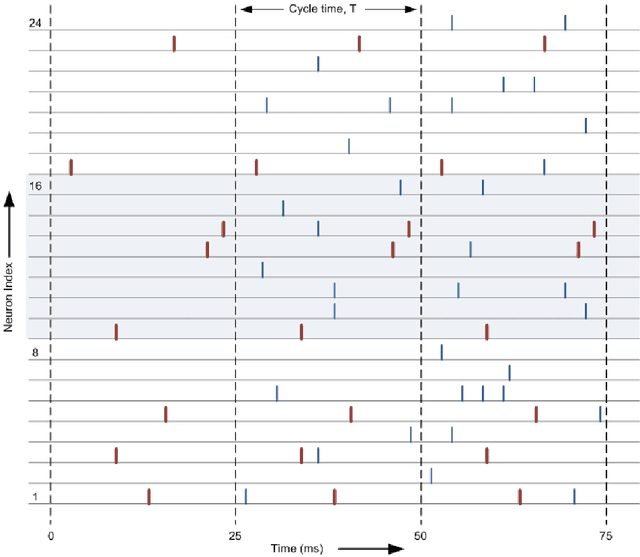
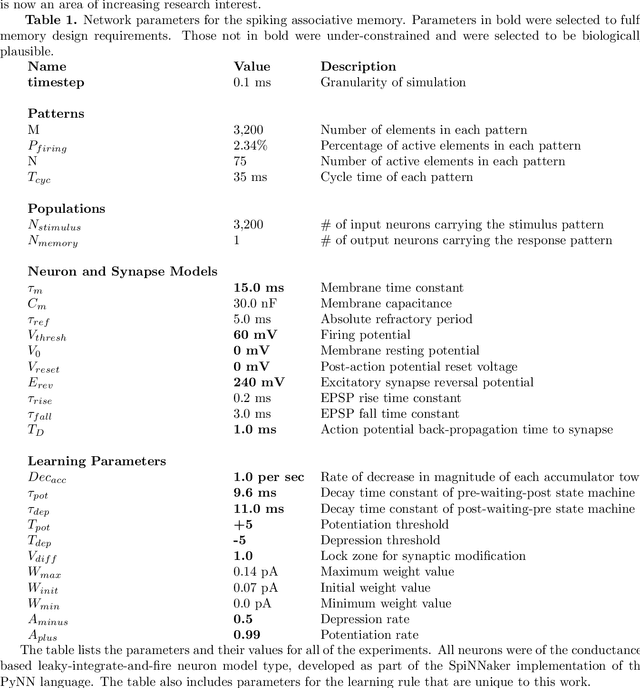
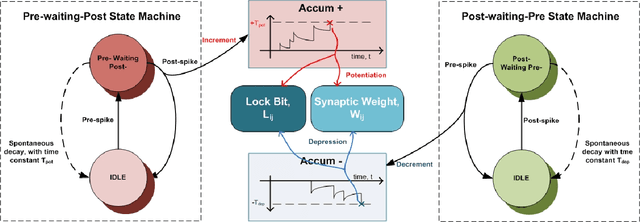
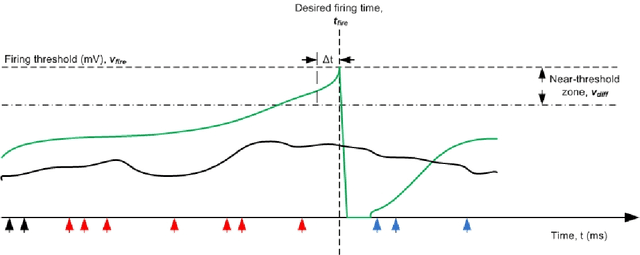
Spike Timing Dependent Plasticity is form of learning that has been demonstrated in real cortical tissue, but attempts to use it for artificial systems have not produced good results. This paper seeks to remedy this with two significant advances. The first is the development a simple stochastic learning rule called cyclic STDP that can extract patterns encoded in the precise spiking times of a group of neurons. We show that a population of neurons endowed with this learning rule can act as an effective short-term associative memory, storing and reliably recalling a large set of pattern associations over an extended period of time. The second major theme examines the challenges associated with training a neuron to produce a spike at a precise time and for the fidelity of spike recall time to be maintained as further learning occurs. The strong constraint of working with precisely-timed spikes (so-called temporal coding) is mandated by the learning rule but is also consistent with the believe in the necessity of such an encoding scheme to render a spiking neural network a competitive solution for flexible intelligent systems in continuous learning environments. The encoding and learning rules are demonstrated in the design of a single-layer associative memory (an input layer consisting of 3,200 spiking neurons fully-connected to a similar sized population of memory neurons), which we simulate and characterise. Design considerations and clarification of the role of parameters under the control of the designer are explored.
SpiNNTools: The Execution Engine for the SpiNNaker Platform
Oct 16, 2018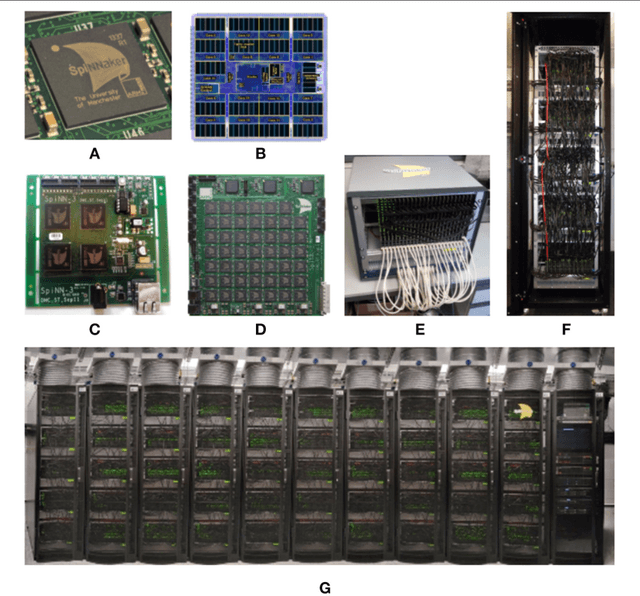
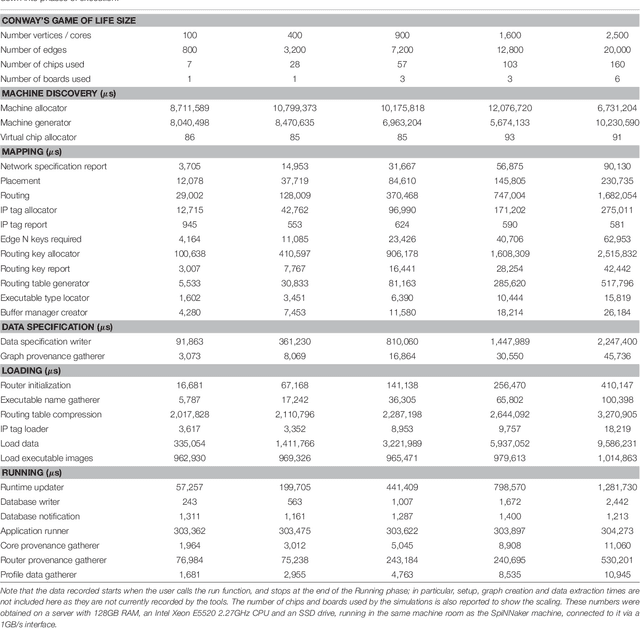
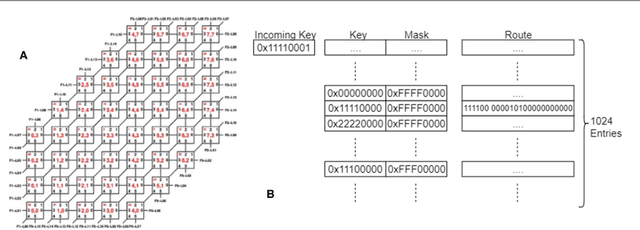
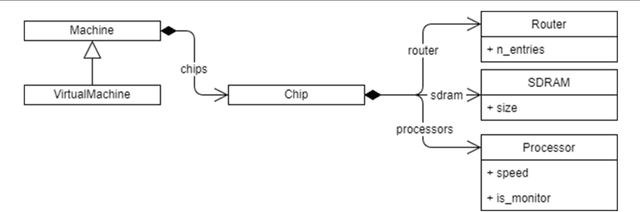
Distributed systems are becoming more common place, as computers typically contain multiple computation processors. The SpiNNaker architecture is such a distributed architecture, containing millions of cores connected with a unique communication network, making it one of the largest neuromorphic computing platforms in the world. Utilising these processors efficiently usually requires expert knowledge of the architecture to generate executable code. This work introduces a set of tools (SpiNNTools) that can map computational work described as a graph in to executable code that runs on this novel machine. The SpiNNaker architecture is highly scalable which in turn produces unique challenges in loading data, executing the mapped problem and the retrieval of data. In this paper we describe these challenges in detail and the solutions implemented.