 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePixel-Accurate Epipolar Guided Matching
Mar 19, 2026Keypoint matching can be slow and unreliable in challenging conditions such as repetitive textures or wide-baseline views. In such cases, known geometric relations (e.g., the fundamental matrix) can be used to restrict potential correspondences to a narrow epipolar envelope, thereby reducing the search space and improving robustness. These epipolar-guided matching approaches have proved effective in tasks such as SfM; however, most rely on coarse spatial binning, which introduces approximation errors, requires costly post-processing, and may miss valid correspondences. We address these limitations with an exact formulation that performs candidate selection directly in angular space. In our approach, each keypoint is assigned a tolerance circle which, when viewed from the epipole, defines an angular interval. Matching then becomes a 1D angular interval query, solved efficiently in logarithmic time with a segment tree. This guarantees pixel-level tolerance, supports per-keypoint control, and removes unnecessary descriptor comparisons. Extensive evaluation on ETH3D demonstrates noticeable speedups over existing approaches while recovering exact correspondence sets.
Keypoints Tracking via Transformer Networks
Mar 24, 2022
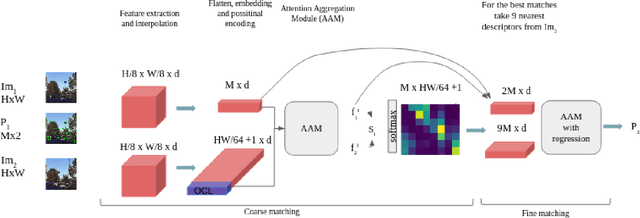
In this thesis, we propose a pioneering work on sparse keypoints tracking across images using transformer networks. While deep learning-based keypoints matching have been widely investigated using graph neural networks - and more recently transformer networks, they remain relatively too slow to operate in real-time and are particularly sensitive to the poor repeatability of the keypoints detectors. In order to address these shortcomings, we propose to study the particular case of real-time and robust keypoints tracking. Specifically, we propose a novel architecture which ensures a fast and robust estimation of the keypoints tracking between successive images of a video sequence. Our method takes advantage of a recent breakthrough in computer vision, namely, visual transformer networks. Our method consists of two successive stages, a coarse matching followed by a fine localization of the keypoints' correspondences prediction. Through various experiments, we demonstrate that our approach achieves competitive results and demonstrates high robustness against adverse conditions, such as illumination change, occlusion and viewpoint differences.