 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Diffusion for Simultaneous Symbolic and Continuous Planning
Sep 26, 2025Constructing robots to accomplish long-horizon tasks is a long-standing challenge within artificial intelligence. Approaches using generative methods, particularly Diffusion Models, have gained attention due to their ability to model continuous robotic trajectories for planning and control. However, we show that these models struggle with long-horizon tasks that involve complex decision-making and, in general, are prone to confusing different modes of behavior, leading to failure. To remedy this, we propose to augment continuous trajectory generation by simultaneously generating a high-level symbolic plan. We show that this requires a novel mix of discrete variable diffusion and continuous diffusion, which dramatically outperforms the baselines. In addition, we illustrate how this hybrid diffusion process enables flexible trajectory synthesis, allowing us to condition synthesized actions on partial and complete symbolic conditions.
Nonparametric adaptive payload tracking for an offshore crane
Mar 15, 2025



A nonparametric adaptive crane control system is proposed where the crane payload tracks a desired trajectory with feedback from the payload position. The payload motion is controlled with the position of the crane tip using partial feedback linearization. This is made possible by introducing a novel model structure given in Cartesian coordinates. This Cartesian model structure makes it possible to implement a nonparametric adaptive controller which cancels disturbances by approximating the effects of unknown disturbance forces and structurally unknown dynamics in a reproducing kernel Hilbert space (RKHS). It is shown that the nonparametric adaptive controller leads to uniformly ultimately bounded errors in the presence of unknown forces and unmodeled dynamics. Moreover, it is shown that the Cartesian formulation has certain advantages in payload tracking control also in the non-adaptive case. The performance of the nonparametric adaptive controller is validated in simulation and experiments with good results.
Learning dissipative Hamiltonian dynamics with reproducing kernel Hilbert spaces and random Fourier features
Oct 24, 2024This paper presents a new method for learning dissipative Hamiltonian dynamics from a limited and noisy dataset. The method uses the Helmholtz decomposition to learn a vector field as the sum of a symplectic and a dissipative vector field. The two vector fields are learned using two reproducing kernel Hilbert spaces, defined by a symplectic and a curl-free kernel, where the kernels are specialized to enforce odd symmetry. Random Fourier features are used to approximate the kernels to reduce the dimension of the optimization problem. The performance of the method is validated in simulations for two dissipative Hamiltonian systems, and it is shown that the method improves predictive accuracy significantly compared to a method where a Gaussian separable kernel is used.
Learning Hamiltonian Dynamics with Reproducing Kernel Hilbert Spaces and Random Features
Apr 11, 2024A method for learning Hamiltonian dynamics from a limited and noisy dataset is proposed. The method learns a Hamiltonian vector field on a reproducing kernel Hilbert space (RKHS) of inherently Hamiltonian vector fields, and in particular, odd Hamiltonian vector fields. This is done with a symplectic kernel, and it is shown how the kernel can be modified to an odd symplectic kernel to impose the odd symmetry. A random feature approximation is developed for the proposed kernel to reduce the problem size. This includes random feature approximations for odd kernels. The performance of the method is validated in simulations for three Hamiltonian systems. It is demonstrated that the use of an odd symplectic kernel improves prediction accuracy, and that the learned vector fields are Hamiltonian and exhibit the imposed odd symmetry characteristics.
Learning of Hamiltonian Dynamics with Reproducing Kernel Hilbert Spaces
Dec 15, 2023This paper presents a method for learning Hamiltonian dynamics from a limited set of data points. The Hamiltonian vector field is found by regularized optimization over a reproducing kernel Hilbert space of vector fields that are inherently Hamiltonian, and where the vector field is required to be odd or even. This is done with a symplectic kernel, and it is shown how this symplectic kernel can be modified to be odd or even. The performance of the method is validated in simulations for two Hamiltonian systems. It is shown that the learned dynamics are Hamiltonian, and that the learned Hamiltonian vector field can be prescribed to be odd or even.
Vision-based control of a knuckle boom crane with online cable length estimation
May 26, 2020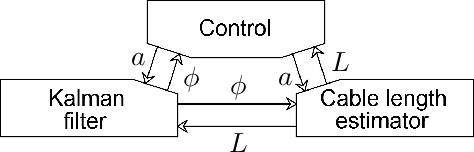
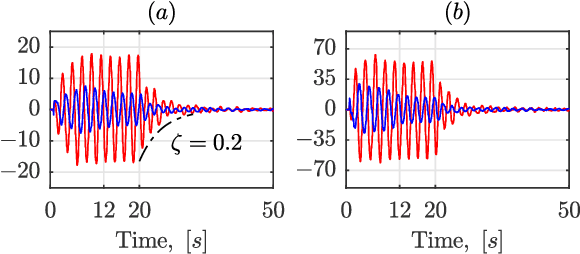
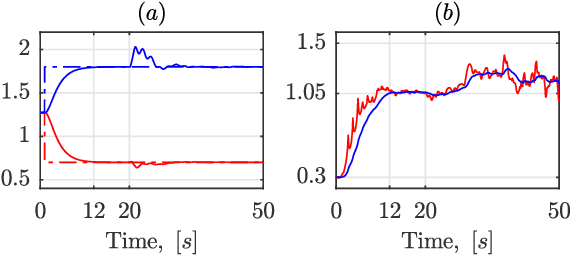
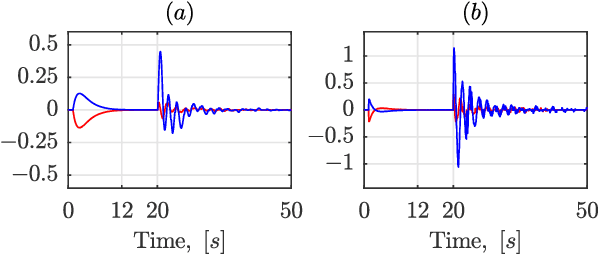
A vision-based controller for a knuckle boom crane is presented. The controller is used to control the motion of the crane tip and at the same time compensate for payload oscillations. The oscillations of the payload are measured with three cameras that are fixed to the crane king and are used to track two spherical markers fixed to the payload cable. Based on color and size information, each camera identifies the image points corresponding to the markers. The payload angles are then determined using linear triangulation of the image points. An extended Kalman filter is used for estimation of payload angles and angular velocity. The length of the payload cable is also estimated using a least squares technique with projection. The crane is controlled by a linear cascade controller where the inner control loop is designed to damp out the pendulum oscillation, and the crane tip is controlled by the outer loop. The control variable of the controller is the commanded crane tip acceleration, which is converted to a velocity command using a velocity loop. The performance of the control system is studied experimentally using a scaled laboratory version of a knuckle boom crane.
Lie Algebraic Unscented Kalman Filter for Pose Estimation
Apr 30, 2020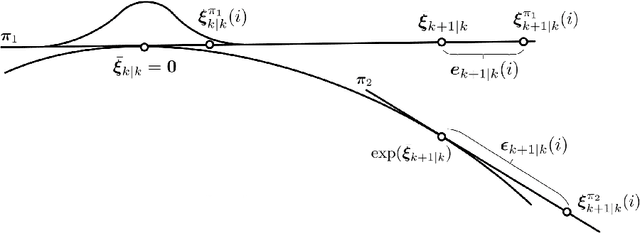
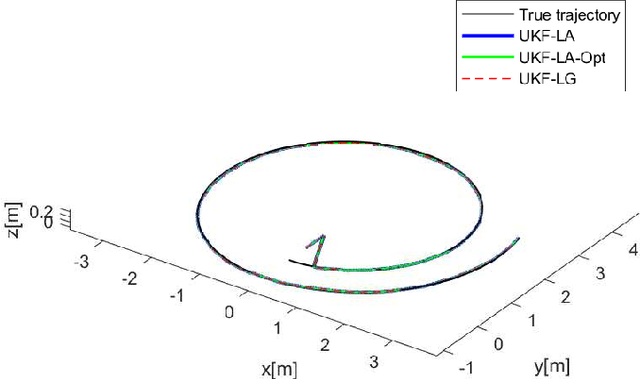
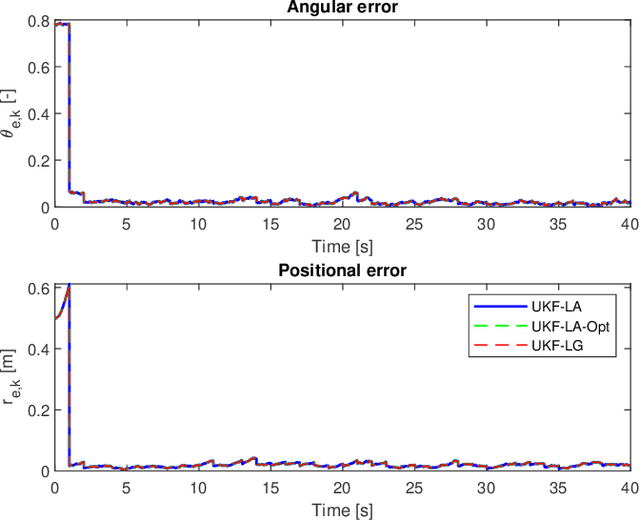
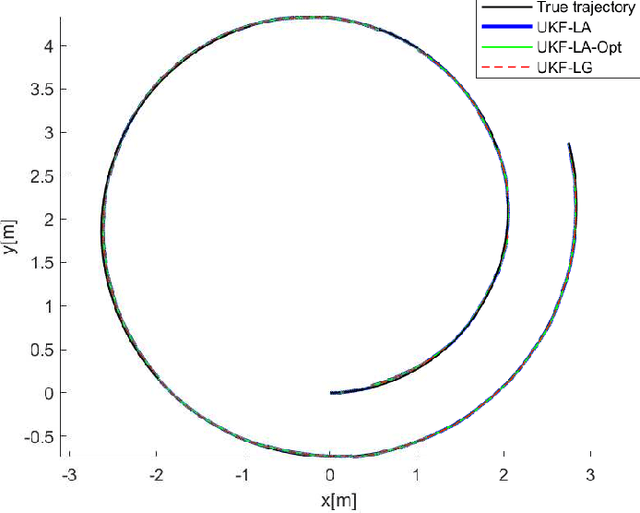
An unscented Kalman filter for matrix Lie groups is proposed where the time propagation of the state is formulated on the Lie algebra. This is done with the kinematic differential equation of the logarithm, where the inverse of the right Jacobian is used. The sigma points can then be expressed as logarithms in vector form, and time propagation of the sigma points and the computation of the mean and the covariance can be done on the Lie algebra. The resulting formulation is to a large extent based on logarithms in vector form, and is therefore closer to the UKF for systems in $\mathbb{R}^n$. This gives an elegant and well-structured formulation which provides additional insight into the problem, and which is computationally efficient. The proposed method is in particular formulated and investigated on the matrix Lie group $SE(3)$. A discussion on right and left Jacobians is included, and a novel closed form solution for the inverse of the right Jacobian on $SE(3)$ is derived, which gives a compact representation involving fewer matrix operations. The proposed method is validated in simulations.