 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Electric Vehicle Energy Demand Forecasting and the Effect of Federated Learning
Feb 24, 2026The wide spread of new energy resources, smart devices, and demand side management strategies has motivated several analytics operations, from infrastructure load modeling to user behavior profiling. Energy Demand Forecasting (EDF) of Electric Vehicle Supply Equipments (EVSEs) is one of the most critical operations for ensuring efficient energy management and sustainability, since it enables utility providers to anticipate energy/power demand, optimize resource allocation, and implement proactive measures to improve grid reliability. However, accurate EDF is a challenging problem due to external factors, such as the varying user routines, weather conditions, driving behaviors, unknown state of charge, etc. Furthermore, as concerns and restrictions about privacy and sustainability have grown, training data has become increasingly fragmented, resulting in distributed datasets scattered across different data silos and/or edge devices, calling for federated learning solutions. In this paper, we investigate different well-established time series forecasting methodologies to address the EDF problem, from statistical methods (the ARIMA family) to traditional machine learning models (such as XGBoost) and deep neural networks (GRU and LSTM). We provide an overview of these methods through a performance comparison over four real-world EVSE datasets, evaluated under both centralized and federated learning paradigms, focusing on the trade-offs between forecasting fidelity, privacy preservation, and energy overheads. Our experimental results demonstrate, on the one hand, the superiority of gradient boosted trees (XGBoost) over statistical and NN-based models in both prediction accuracy and energy efficiency and, on the other hand, an insight that Federated Learning-enabled models balance these factors, offering a promising direction for decentralized energy demand forecasting.
On Vessel Location Forecasting and the Effect of Federated Learning
May 30, 2024The wide spread of Automatic Identification System (AIS) has motivated several maritime analytics operations. Vessel Location Forecasting (VLF) is one of the most critical operations for maritime awareness. However, accurate VLF is a challenging problem due to the complexity and dynamic nature of maritime traffic conditions. Furthermore, as privacy concerns and restrictions have grown, training data has become increasingly fragmented, resulting in dispersed databases of several isolated data silos among different organizations, which in turn decreases the quality of learning models. In this paper, we propose an efficient VLF solution based on LSTM neural networks, in two variants, namely Nautilus and FedNautilus for the centralized and the federated learning approach, respectively. We also demonstrate the superiority of the centralized approach with respect to current state of the art and discuss the advantages and disadvantages of the federated against the centralized approach.
Moving Objects Analytics: Survey on Future Location & Trajectory Prediction Methods
Jul 11, 2018



The tremendous growth of positioning technologies and GPS enabled devices has produced huge volumes of tracking data during the recent years. This source of information constitutes a rich input for data analytics processes, either offline (e.g. cluster analysis, hot motion discovery) or online (e.g. short-term forecasting of forthcoming positions). This paper focuses on predictive analytics for moving objects (could be pedestrians, cars, vessels, planes, animals, etc.) and surveys the state-of-the-art in the context of future location and trajectory prediction. We provide an extensive review of over 50 works, also proposing a novel taxonomy of predictive algorithms over moving objects. We also list the properties of several real datasets used in the past for validation purposes of those works and, motivated by this, we discuss challenges that arise in the transition from conventional to Big Data applications. CCS Concepts: Information systems > Spatial-temporal systems; Information systems > Data analytics; Information systems > Data mining; Computing methodologies > Machine learning Additional Key Words and Phrases: mobility data, moving object trajectories, trajectory prediction, future location prediction.
Online Event Recognition from Moving Vessel Trajectories
Jan 22, 2016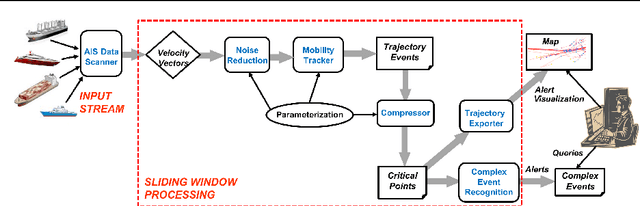
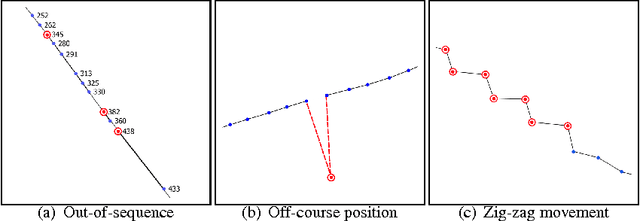
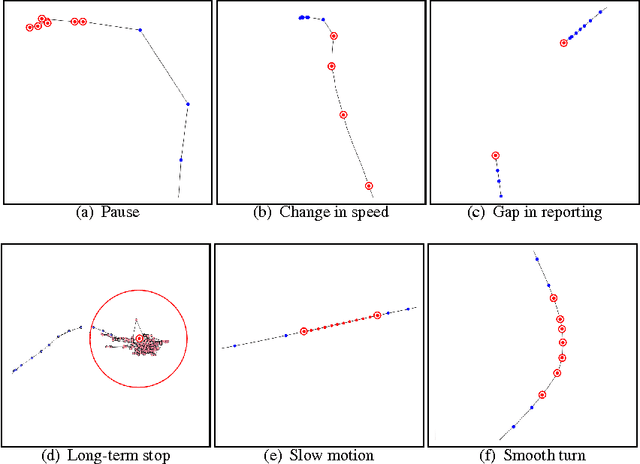
We present a system for online monitoring of maritime activity over streaming positions from numerous vessels sailing at sea. It employs an online tracking module for detecting important changes in the evolving trajectory of each vessel across time, and thus can incrementally retain concise, yet reliable summaries of its recent movement. In addition, thanks to its complex event recognition module, this system can also offer instant notification to marine authorities regarding emergency situations, such as risk of collisions, suspicious moves in protected zones, or package picking at open sea. Not only did our extensive tests validate the performance, efficiency, and robustness of the system against scalable volumes of real-world and synthetically enlarged datasets, but its deployment against online feeds from vessels has also confirmed its capabilities for effective, real-time maritime surveillance.