 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFedUKD: Federated UNet Model with Knowledge Distillation for Land Use Classification from Satellite and Street Views
Dec 05, 2022



Federated Deep Learning frameworks can be used strategically to monitor Land Use locally and infer environmental impacts globally. Distributed data from across the world would be needed to build a global model for Land Use classification. The need for a Federated approach in this application domain would be to avoid transfer of data from distributed locations and save network bandwidth to reduce communication cost. We use a Federated UNet model for Semantic Segmentation of satellite and street view images. The novelty of the proposed architecture is the integration of Knowledge Distillation to reduce communication cost and response time. The accuracy obtained was above 95% and we also brought in a significant model compression to over 17 times and 62 times for street View and satellite images respectively. Our proposed framework has the potential to be a game-changer in real-time tracking of climate change across the planet.
Haptic Shared Control Improves Neural Efficiency During Myoelectric Prosthesis Use
May 27, 2022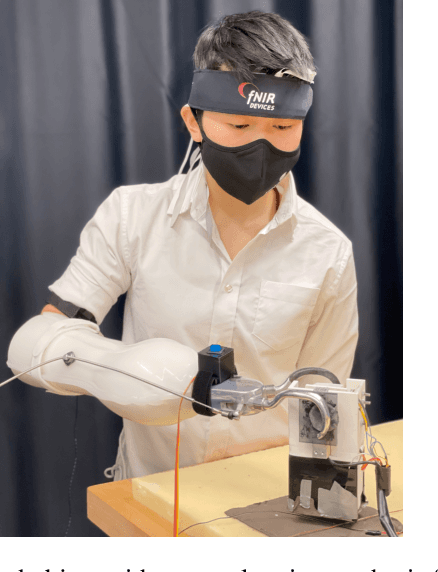
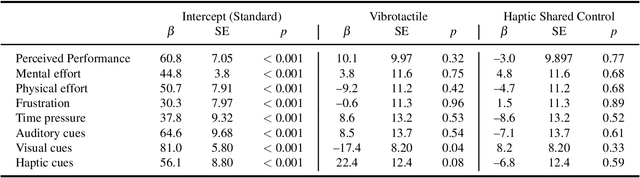
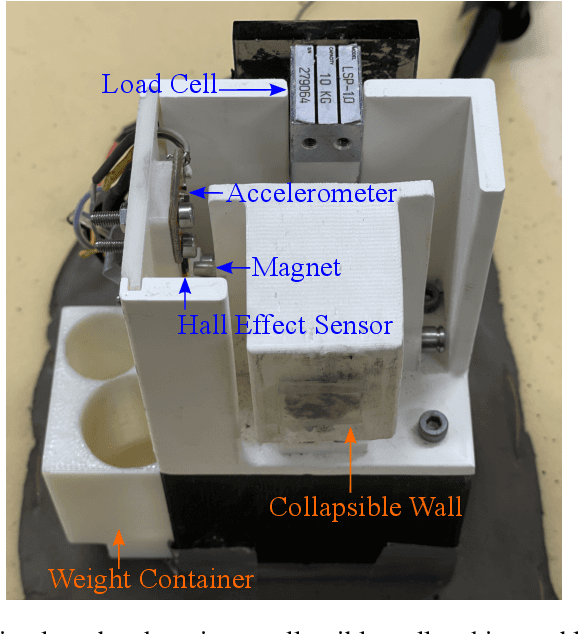
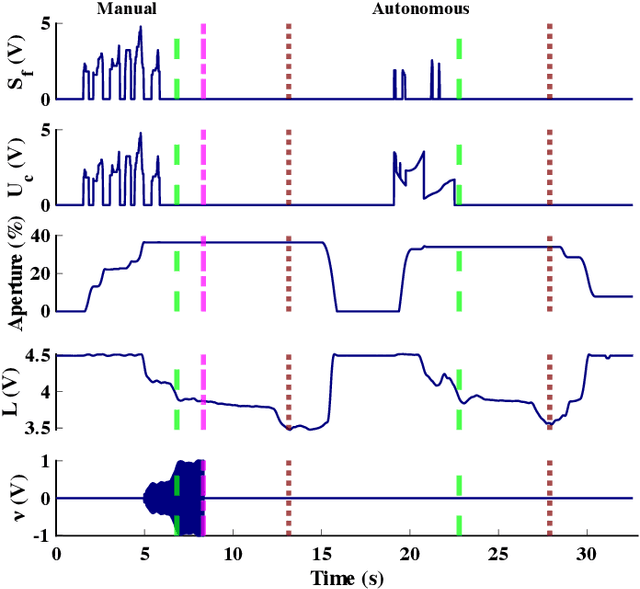
Clinical myoelectric prostheses lack the sensory feedback and sufficient dexterity required to complete activities of daily living efficiently and accurately. Providing haptic feedback of relevant environmental cues to the user or imbuing the prosthesis with autonomous control authority have been separately shown to improve prosthesis utility. Few studies, however, have investigated the effect of combining these two approaches in a shared control paradigm, and none have evaluated such an approach from the perspective of neural efficiency (the relationship between task performance and mental effort measured directly from the brain). In this work, we analyzed the neural efficiency of 30 non-amputee participants in a grasp-and-lift task of a brittle object. Here, a myoelectric prosthesis featuring vibrotactile feedback of grip force and autonomous control of grasping was compared with a standard myoelectric prosthesis with and without vibrotactile feedback. As a measure of mental effort, we captured the prefrontal cortex activity changes using functional near infrared spectroscopy during the experiment. Results showed that only the haptic shared control system enabled users to achieve high neural efficiency, and that vibrotactile feedback was important for grasping with the appropriate grip force. These results indicate that the haptic shared control system synergistically combines the benefits of haptic feedback and autonomous controllers, and is well-poised to inform such hybrid advancements in myoelectric prosthesis technology.
The Utility of Synthetic Reflexes and Haptic Feedback for Upper-Limb Prostheses in a Dexterous Task Without Direct Vision
May 27, 2022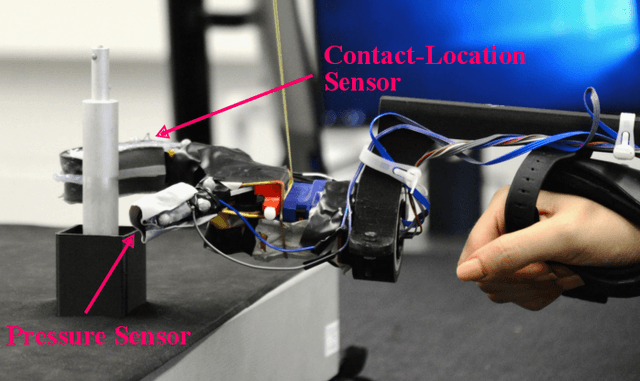
Individuals who use myoelectric upper-limb prostheses often rely heavily on vision to complete their daily activities. They thus struggle in situations where vision is overloaded, such as multitasking, or unavailable, such as poor lighting conditions. Non-amputees can easily accomplish such tasks due to tactile reflexes and haptic sensation guiding their upper-limb motor coordination. Based on these principles, we developed and tested two novel prosthesis systems that incorporate autonomous controllers and provide the user with touch-location feedback through either vibration or distributed pressure. These capabilities were made possible by installing a custom contact-location sensor on thefingers of a commercial prosthetic hand, along with a custom pressure sensor on the thumb. We compared the performance of the two systems against a standard myoelectric prosthesis and a myoelectric prosthesis with only autonomous controllers in a difficult reach-to-pick-and-place task conducted without direct vision. Results from 40 non-amputee participants in this between-subjects study indicated that vibrotactile feedback combined with synthetic reflexes proved significantly more advantageous than the standard prosthesis in several of the task milestones. In addition, vibrotactile feedback and synthetic reflexes improved grasp placement compared to only synthetic reflexes or pressure feedback combined with synthetic reflexes. These results indicate that both autonomous controllers and haptic feedback facilitate success in dexterous tasks without vision, and that the type of haptic display matters.
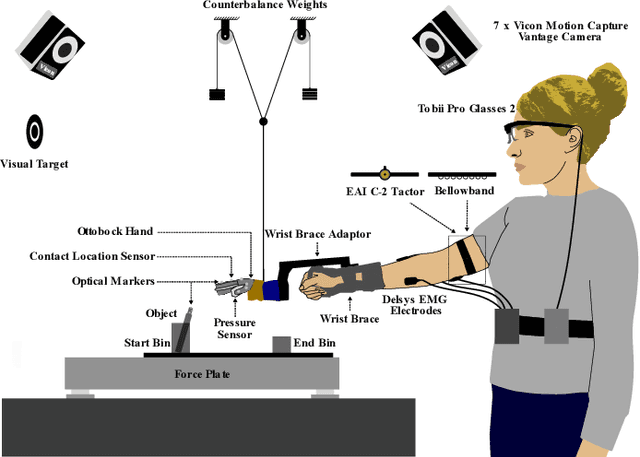
Sensorimotor-inspired Tactile Feedback and Control Improve Consistency of Prosthesis Manipulation in the Absence of Direct Vision
Jul 14, 2021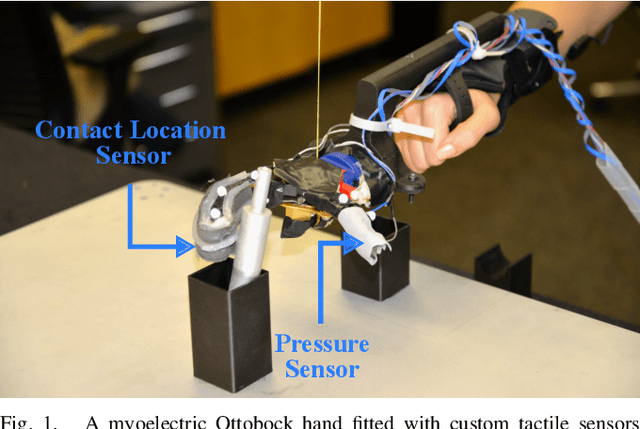
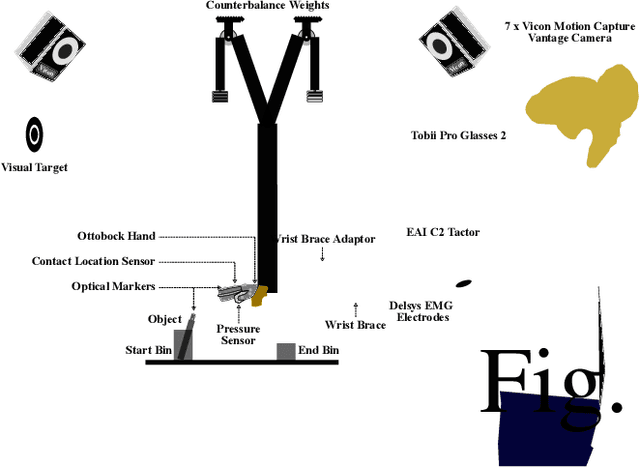
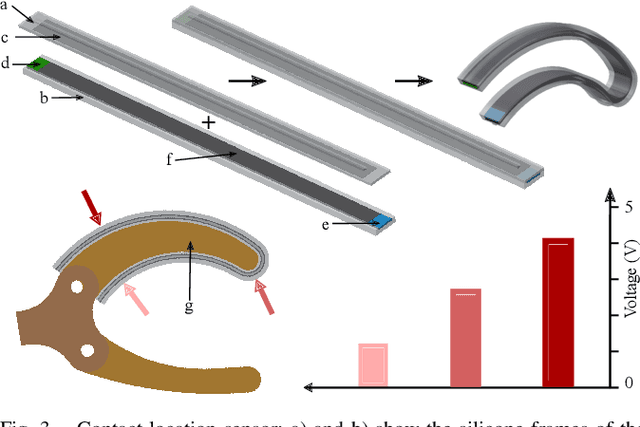
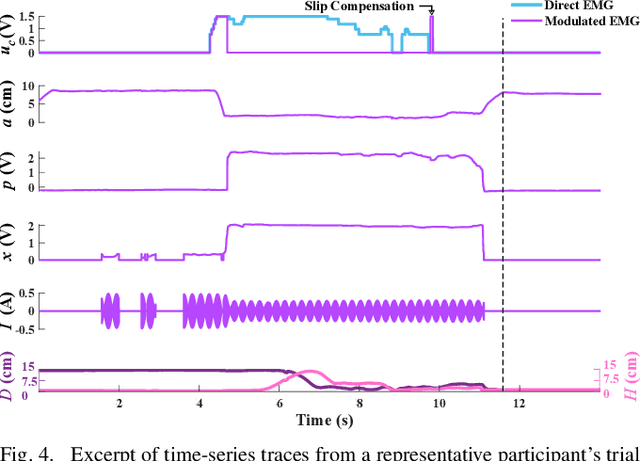
The lack of haptically aware upper-limb prostheses forces amputees to rely largely on visual cues to complete activities of daily living. In contrast, able-bodied individuals inherently rely on conscious haptic perception and automatic tactile reflexes to govern volitional actions in situations that do not allow for constant visual attention. We therefore propose a myoelectric prosthesis system that reflects these concepts to aid manipulation performance without direct vision. To implement this design, we built two fabric-based tactile sensors that measure contact location along the palmar and dorsal sides of the prosthetic fingers and grasp pressure at the tip of the prosthetic thumb. Inspired by the natural sensorimotor system, we use the measurements from these sensors to provide vibrotactile feedback of contact location and implement a tactile grasp controller that uses automatic reflexes to prevent over-grasping and object slip. We compare this system to a standard myoelectric prosthesis in a challenging reach-to-pick-and-place task conducted without direct vision; 17 able-bodied adults took part in this single-session between-subjects study. Participants in the tactile group achieved more consistent high performance compared to participants in the standard group. These results indicate that the addition of contact-location feedback and reflex control increases the consistency with which objects can be grasped and moved without direct vision in upper-limb prosthetics.