 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWildDepth: A Multimodal Dataset for 3D Wildlife Perception and Depth Estimation
Mar 17, 2026Depth estimation and 3D reconstruction have been extensively studied as core topics in computer vision. Starting from rigid objects with relatively simple geometric shapes, such as vehicles, the research has expanded to address general objects, including challenging deformable objects, such as humans and animals. However, for the animal, in particular, the majority of existing models are trained based on datasets without metric scale, which can help validate image-only models. To address this limitation, we present WildDepth, a multimodal dataset and benchmark suite for depth estimation, behavior detection, and 3D reconstruction from diverse categories of animals ranging from domestic to wild environments with synchronized RGB and LiDAR. Experimental results show that the use of multi-modal data improves depth reliability by up to 10% RMSE, while RGB-LiDAR fusion enhances 3D reconstruction fidelity by 12% in Chamfer distance. By releasing WildDepth and its benchmarks, we aim to foster robust multimodal perception systems that generalize across domains.
AcinoSet: A 3D Pose Estimation Dataset and Baseline Models for Cheetahs in the Wild
Mar 24, 2021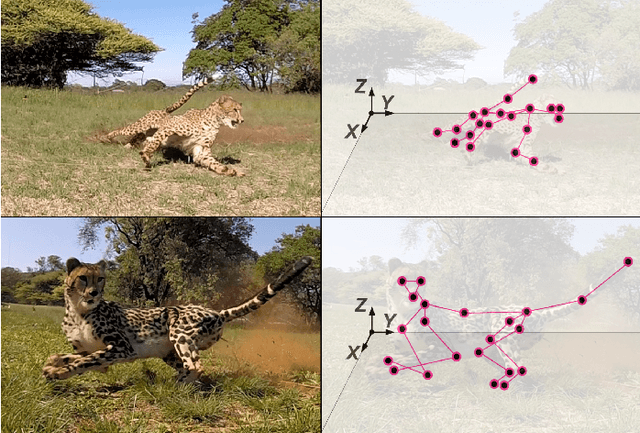
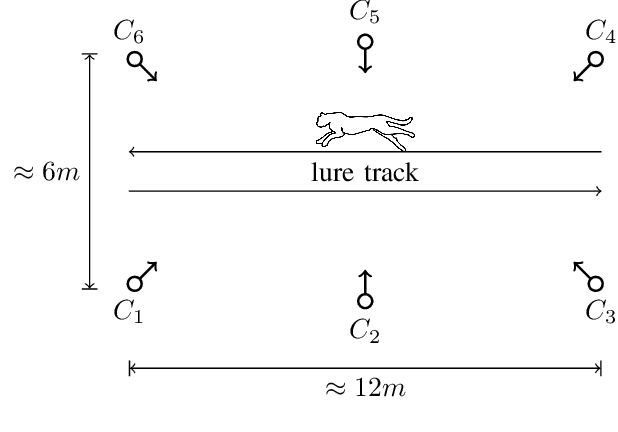
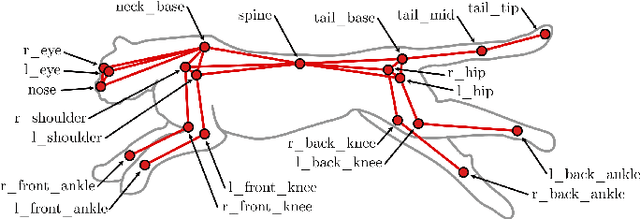
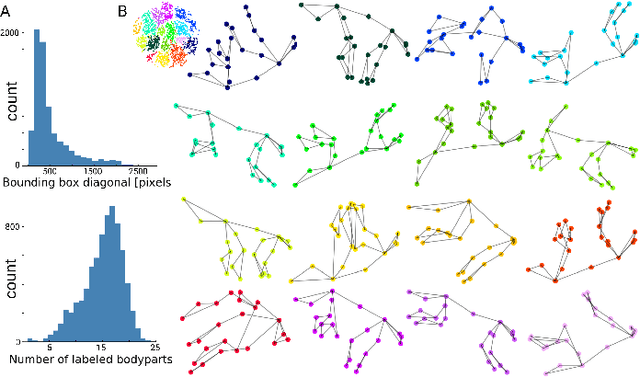
Animals are capable of extreme agility, yet understanding their complex dynamics, which have ecological, biomechanical and evolutionary implications, remains challenging. Being able to study this incredible agility will be critical for the development of next-generation autonomous legged robots. In particular, the cheetah (acinonyx jubatus) is supremely fast and maneuverable, yet quantifying its whole-body 3D kinematic data during locomotion in the wild remains a challenge, even with new deep learning-based methods. In this work we present an extensive dataset of free-running cheetahs in the wild, called AcinoSet, that contains 119,490 frames of multi-view synchronized high-speed video footage, camera calibration files and 7,588 human-annotated frames. We utilize markerless animal pose estimation to provide 2D keypoints. Then, we use three methods that serve as strong baselines for 3D pose estimation tool development: traditional sparse bundle adjustment, an Extended Kalman Filter, and a trajectory optimization-based method we call Full Trajectory Estimation. The resulting 3D trajectories, human-checked 3D ground truth, and an interactive tool to inspect the data is also provided. We believe this dataset will be useful for a diverse range of fields such as ecology, neuroscience, robotics, biomechanics as well as computer vision.
Combining Spiking Neural Network and Artificial Neural Network for Enhanced Image Classification
Feb 28, 2021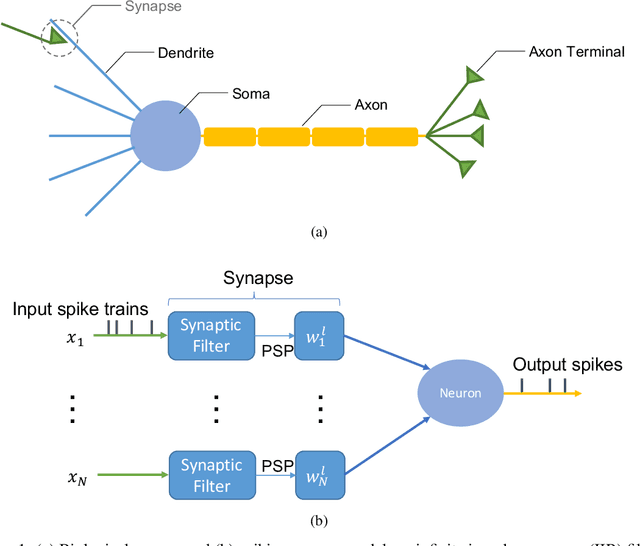
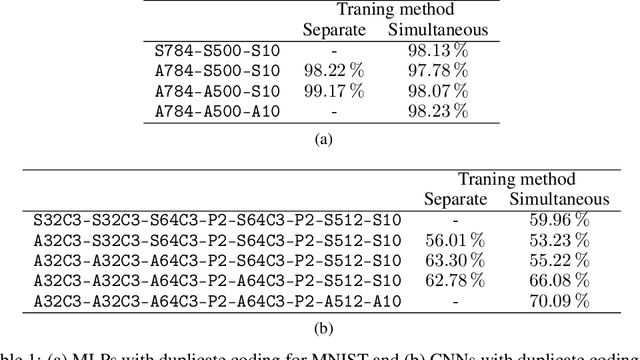
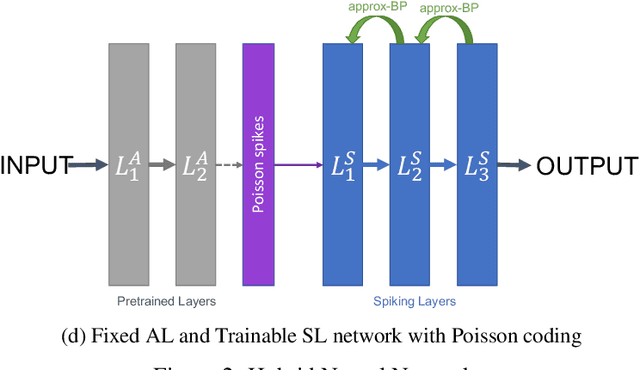
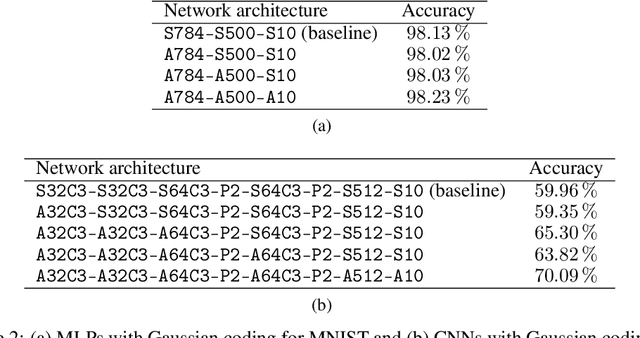
With the continued innovations of deep neural networks, spiking neural networks (SNNs) that more closely resemble biological brain synapses have attracted attention owing to their low power consumption.However, for continuous data values, they must employ a coding process to convert the values to spike trains.Thus, they have not yet exceeded the performance of artificial neural networks (ANNs), which handle such values directly.To this end, we combine an ANN and an SNN to build versatile hybrid neural networks (HNNs) that improve the concerned performance.To qualify this performance, MNIST and CIFAR-10 image datasets are used for various classification tasks in which the training and coding methods changes.In addition, we present simultaneous and separate methods to train the artificial and spiking layers, considering the coding methods of each.We find that increasing the number of artificial layers at the expense of spiking layers improves the HNN performance.For straightforward datasets such as MNIST, it is easy to achieve the same performance as ANNs by using duplicate coding and separate learning.However, for more complex tasks, the use of Gaussian coding and simultaneous learning is found to improve the accuracy of HNNs while utilizing a smaller number of artificial layers.