 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultichannel Robot Speech Recognition Database: MChRSR
Dec 30, 2017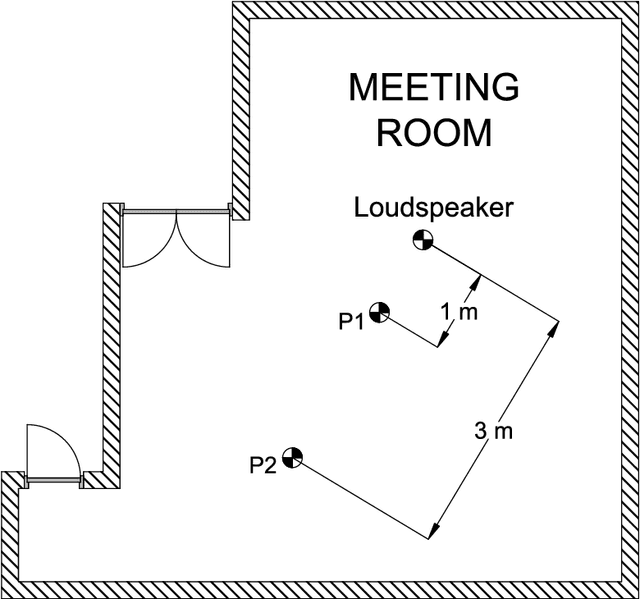
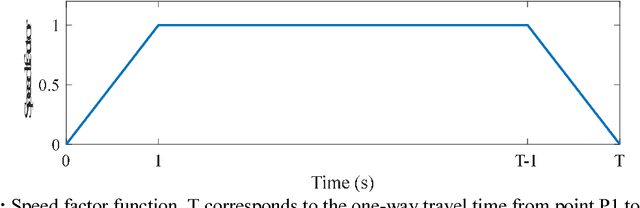
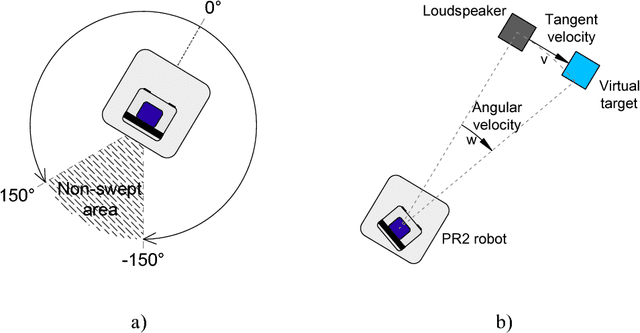
In real human robot interaction (HRI) scenarios, speech recognition represents a major challenge due to robot noise, background noise and time-varying acoustic channel. This document describes the procedure used to obtain the Multichannel Robot Speech Recognition Database (MChRSR). It is composed of 12 hours of multichannel evaluation data recorded in a real mobile HRI scenario. This database was recorded with a PR2 robot performing different translational and azimuthal movements. Accordingly, 16 evaluation sets were obtained re-recording the clean set of the Aurora 4 database in different movement conditions.
DNN-based uncertainty estimation for weighted DNN-HMM ASR
May 29, 2017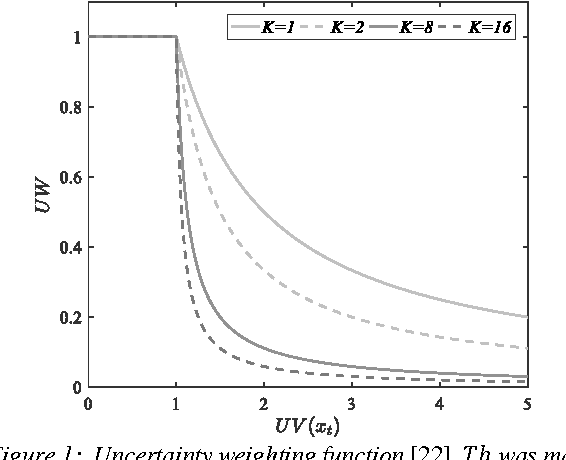
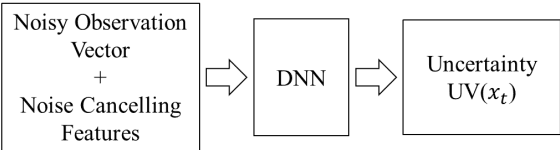
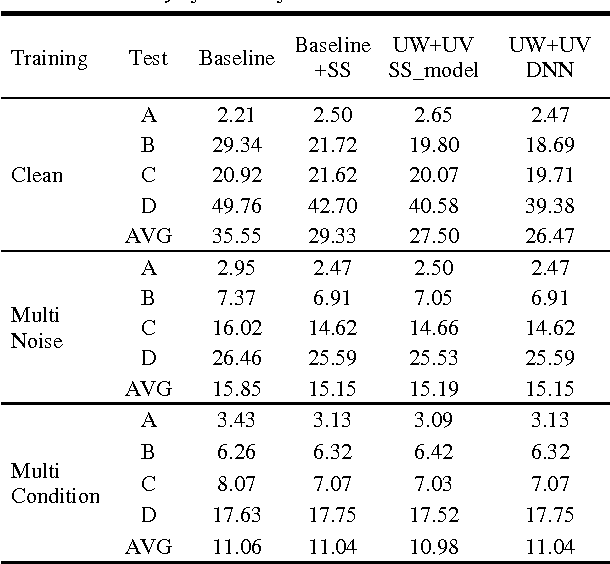
In this paper, the uncertainty is defined as the mean square error between a given enhanced noisy observation vector and the corresponding clean one. Then, a DNN is trained by using enhanced noisy observation vectors as input and the uncertainty as output with a training database. In testing, the DNN receives an enhanced noisy observation vector and delivers the estimated uncertainty. This uncertainty in employed in combination with a weighted DNN-HMM based speech recognition system and compared with an existing estimation of the noise cancelling uncertainty variance based on an additive noise model. Experiments were carried out with Aurora-4 task. Results with clean, multi-noise and multi-condition training are presented.