 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-end LSTM based estimation of volcano event epicenter localization
Oct 27, 2021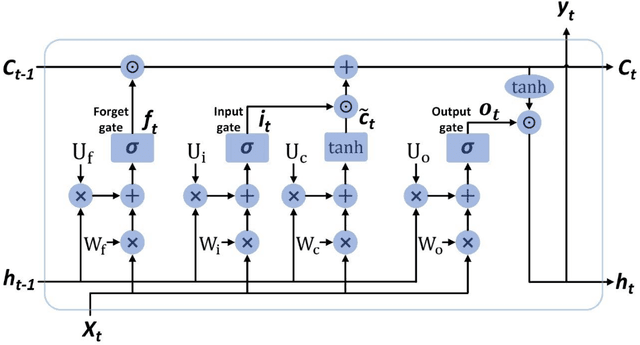
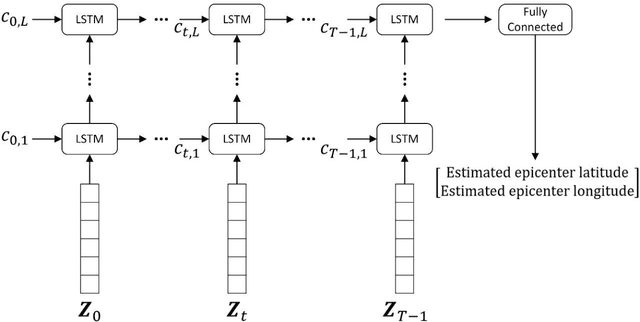
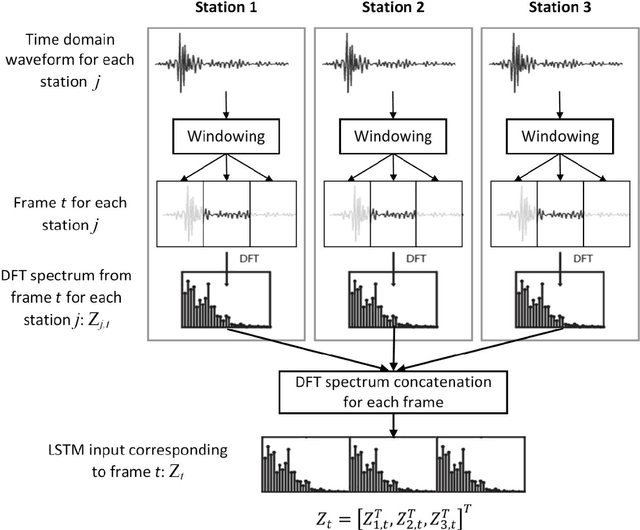
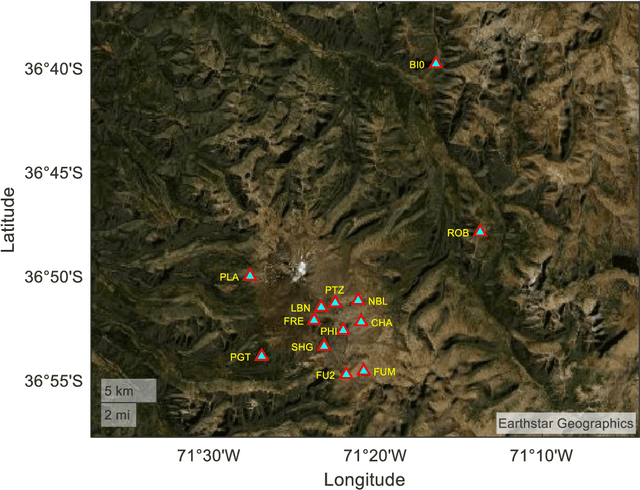
In this paper, an end-to-end based LSTM scheme is proposed to address the problem of volcano event localization without any a priori model relating phase picking with localization estimation. It is worth emphasizing that automatic phase picking in volcano signals is highly inaccurate because of the short distances between the event epicenters and the seismograph stations. LSTM was chosen due to its capability to capture the dynamics of time varying signals, and to remove or add information within the memory cell state and model long-term dependencies. A brief insight into LSTM is also discussed here. The results presented in this paper show that the LSTM based architecture provided a success rate, i.e., an error smaller than 1.0Km, equal to 48.5%, which in turn is dramatically superior to the one delivered by automatic phase picking. Moreover, the proposed end-to-end LSTM based method gave a success rate 18% higher than CNN.
Multichannel Robot Speech Recognition Database: MChRSR
Dec 30, 2017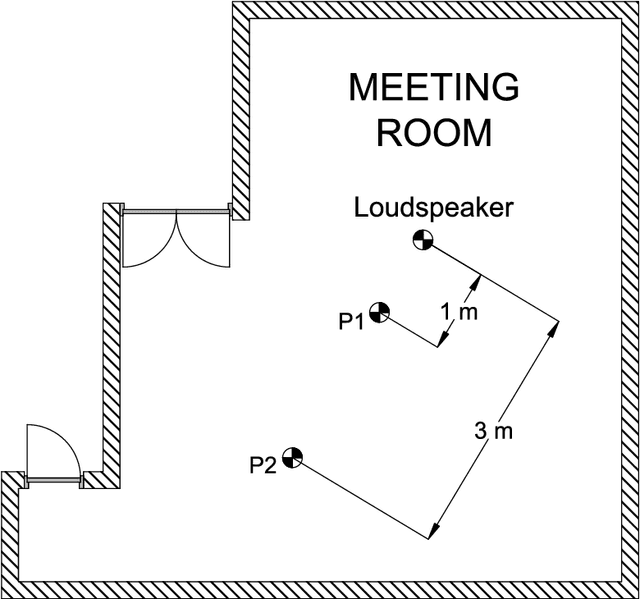
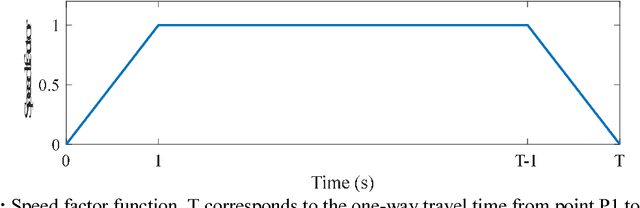
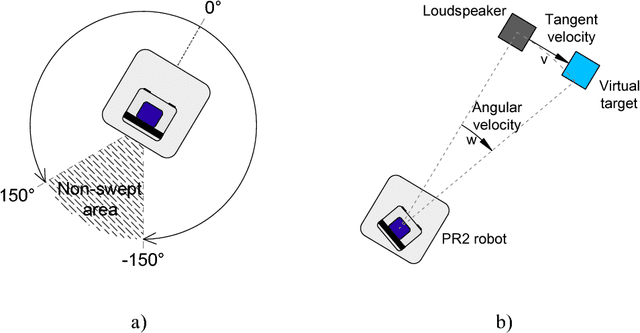
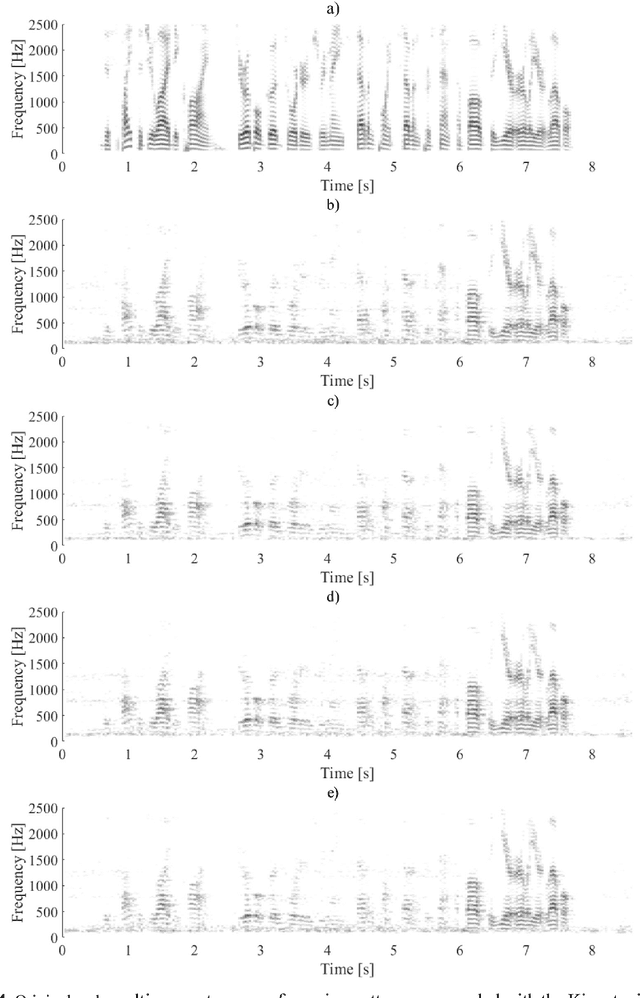
In real human robot interaction (HRI) scenarios, speech recognition represents a major challenge due to robot noise, background noise and time-varying acoustic channel. This document describes the procedure used to obtain the Multichannel Robot Speech Recognition Database (MChRSR). It is composed of 12 hours of multichannel evaluation data recorded in a real mobile HRI scenario. This database was recorded with a PR2 robot performing different translational and azimuthal movements. Accordingly, 16 evaluation sets were obtained re-recording the clean set of the Aurora 4 database in different movement conditions.