 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-based Perception for Autonomous Vehicles in Obstacle Avoidance Scenarios
Jul 16, 2025



Obstacle avoidance is essential for ensuring the safety of autonomous vehicles. Accurate perception and motion planning are crucial to enabling vehicles to navigate complex environments while avoiding collisions. In this paper, we propose an efficient obstacle avoidance pipeline that leverages a camera-only perception module and a Frenet-Pure Pursuit-based planning strategy. By integrating advancements in computer vision, the system utilizes YOLOv11 for object detection and state-of-the-art monocular depth estimation models, such as Depth Anything V2, to estimate object distances. A comparative analysis of these models provides valuable insights into their accuracy, efficiency, and robustness in real-world conditions. The system is evaluated in diverse scenarios on a university campus, demonstrating its effectiveness in handling various obstacles and enhancing autonomous navigation. The video presenting the results of the obstacle avoidance experiments is available at: https://www.youtube.com/watch?v=FoXiO5S_tA8
Physics-informed Ground Reaction Dynamics from Human Motion Capture
Jul 02, 2025



Body dynamics are crucial information for the analysis of human motions in important research fields, ranging from biomechanics, sports science to computer vision and graphics. Modern approaches collect the body dynamics, external reactive force specifically, via force plates, synchronizing with human motion capture data, and learn to estimate the dynamics from a black-box deep learning model. Being specialized devices, force plates can only be installed in laboratory setups, imposing a significant limitation on the learning of human dynamics. To this end, we propose a novel method for estimating human ground reaction dynamics directly from the more reliable motion capture data with physics laws and computational simulation as constrains. We introduce a highly accurate and robust method for computing ground reaction forces from motion capture data using Euler's integration scheme and PD algorithm. The physics-based reactive forces are used to inform the learning model about the physics-informed motion dynamics thus improving the estimation accuracy. The proposed approach was tested on the GroundLink dataset, outperforming the baseline model on: 1) the ground reaction force estimation accuracy compared to the force plates measurement; and 2) our simulated root trajectory precision. The implementation code is available at https://github.com/cuongle1206/Phys-GRD
Real-time Human Detection in Fire Scenarios using Infrared and Thermal Imaging Fusion
Jul 09, 2023



Fire is considered one of the most serious threats to human lives which results in a high probability of fatalities. Those severe consequences stem from the heavy smoke emitted from a fire that mostly restricts the visibility of escaping victims and rescuing squad. In such hazardous circumstances, the use of a vision-based human detection system is able to improve the ability to save more lives. To this end, a thermal and infrared imaging fusion strategy based on multiple cameras for human detection in low-visibility scenarios caused by smoke is proposed in this paper. By processing with multiple cameras, vital information can be gathered to generate more useful features for human detection. Firstly, the cameras are calibrated using a Light Heating Chessboard. Afterward, the features extracted from the input images are merged prior to being passed through a lightweight deep neural network to perform the human detection task. The experiments conducted on an NVIDIA Jetson Nano computer demonstrated that the proposed method can process with reasonable speed and can achieve favorable performance with a mAP@0.5 of 95%.
POCS-based Clustering Algorithm
Aug 15, 2022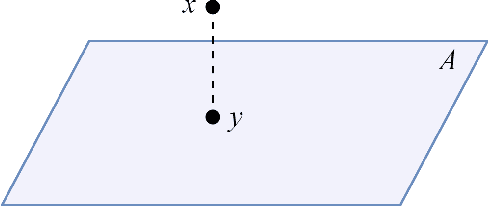
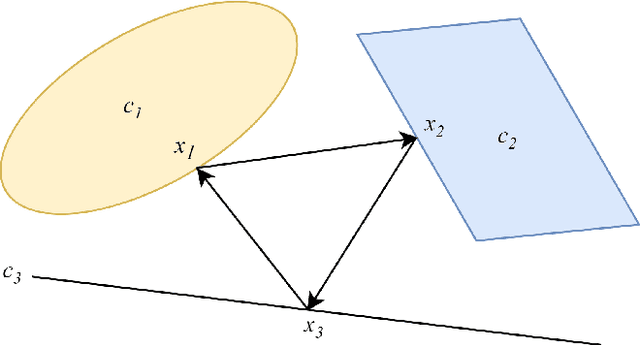
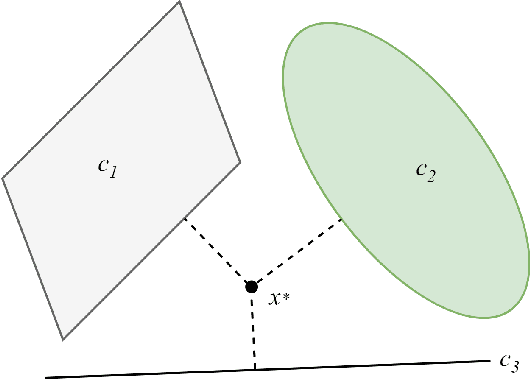
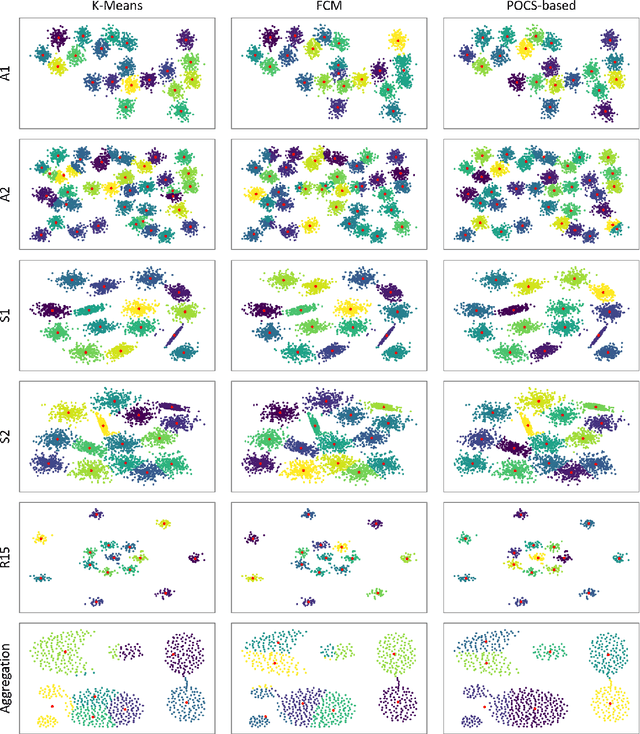
A novel clustering technique based on the projection onto convex set (POCS) method, called POCS-based clustering algorithm, is proposed in this paper. The proposed POCS-based clustering algorithm exploits a parallel projection method of POCS to find appropriate cluster prototypes in the feature space. The algorithm considers each data point as a convex set and projects the cluster prototypes parallelly to the member data points. The projections are convexly combined to minimize the objective function for data clustering purpose. The performance of the proposed POCS-based clustering algorithm is verified through experiments on various synthetic datasets. The experimental results show that the proposed POCS-based clustering algorithm is competitive and efficient in terms of clustering error and execution speed when compared with other conventional clustering methods including Fuzzy C-Means (FCM) and K-means clustering algorithms.
Robustness Enhancement of Object Detection in Advanced Driver Assistance Systems (ADAS)
May 04, 2021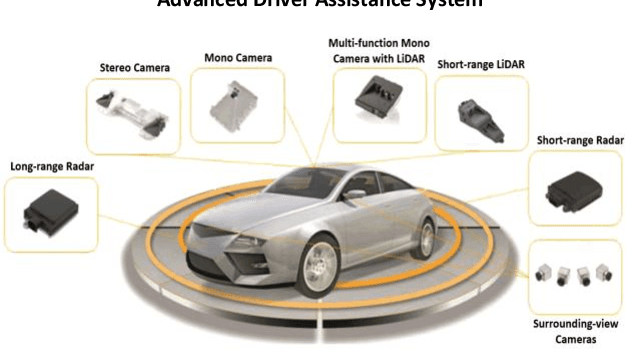
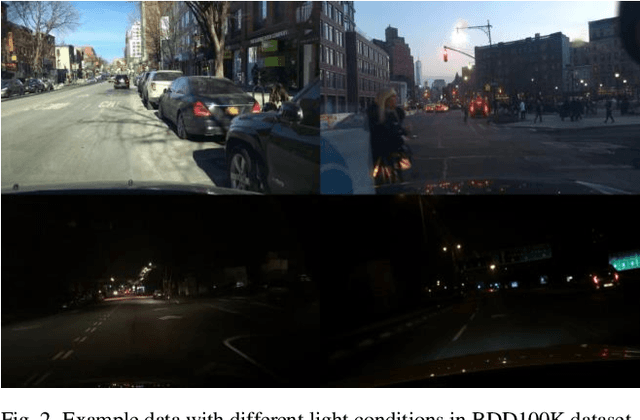
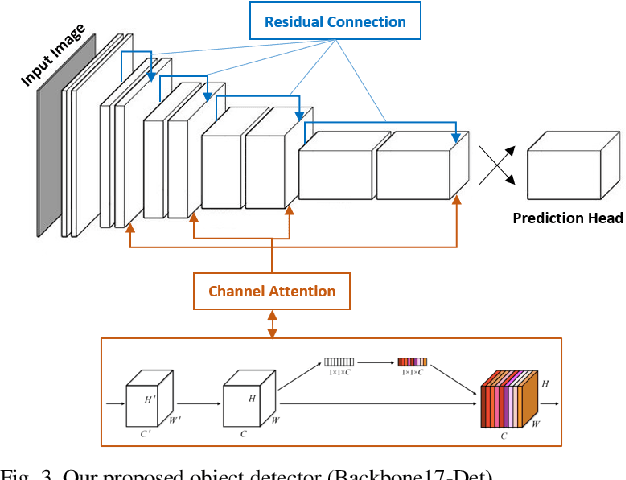
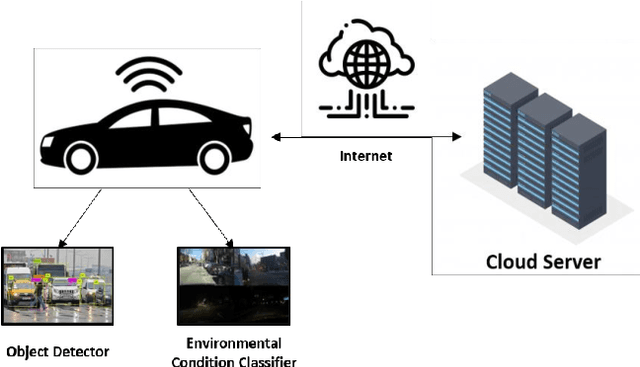
A unified system integrating a compact object detector and a surrounding environmental condition classifier for enhancing the robustness of object detection scheme in advanced driver assistance systems (ADAS) is proposed in this paper. ADAS are invented to improve traffic safety and effectiveness in autonomous driving systems where object detection plays an extremely important role. However, modern object detectors integrated in ADAS are still unstable due to high latency and the variation of the environmental contexts in the deployment phase. Our system is proposed to address the aforementioned problems. The proposed system includes two main components: (1) a compact one-stage object detector which is expected to be able to perform at a comparable accuracy compared to state-of-the-art object detectors, and (2) an environmental condition detector that helps to send a warning signal to the cloud in case the self-driving car needs human actions due to the significance of the situation. The empirical results prove the reliability and the scalability of the proposed system to realistic scenarios.