 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Data-Driven Fault Diagnostic Techniques for Marine Diesel Engines
Apr 16, 2024Fault diagnosis in marine diesel engines is vital for maritime safety and operational efficiency.These engines are integral to marine vessels, and their reliable performance is crucial for safenavigation. Swift identification and resolution of faults are essential to prevent breakdowns,enhance safety, and reduce the risk of catastrophic failures at sea. Proactive fault diagnosisfacilitates timely maintenance, minimizes downtime, and ensures the overall reliability andlongevity of marine diesel engines. This paper explores the importance of fault diagnosis,emphasizing subsystems, common faults, and recent advancements in data-driven approachesfor effective marine diesel engine maintenance
Neural Modeling and Control of Diesel Engine with Pollution Constraints
Jul 20, 2009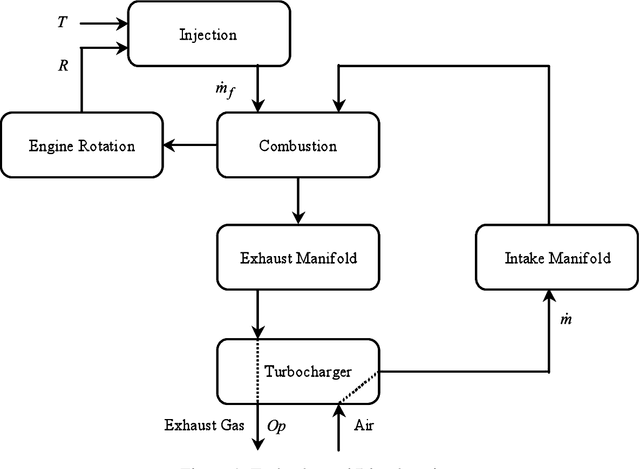
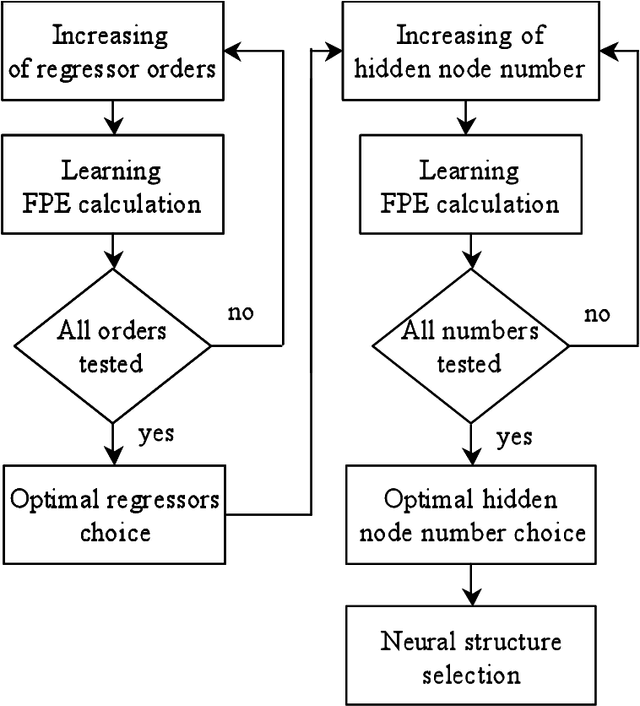
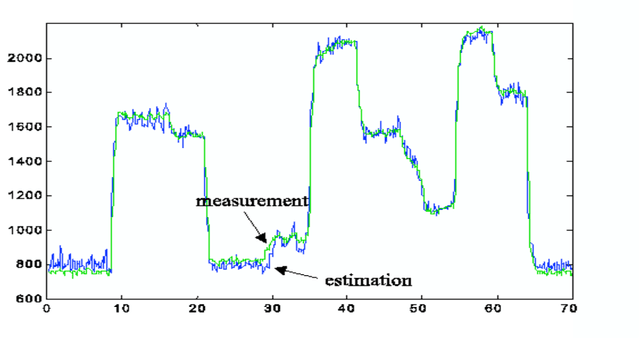
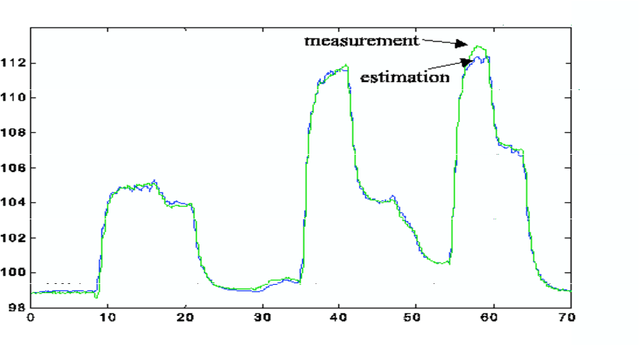
The paper describes a neural approach for modelling and control of a turbocharged Diesel engine. A neural model, whose structure is mainly based on some physical equations describing the engine behaviour, is built for the rotation speed and the exhaust gas opacity. The model is composed of three interconnected neural submodels, each of them constituting a nonlinear multi-input single-output error model. The structural identification and the parameter estimation from data gathered on a real engine are described. The neural direct model is then used to determine a neural controller of the engine, in a specialized training scheme minimising a multivariable criterion. Simulations show the effect of the pollution constraint weighting on a trajectory tracking of the engine speed. Neural networks, which are flexible and parsimonious nonlinear black-box models, with universal approximation capabilities, can accurately describe or control complex nonlinear systems, with little a priori theoretical knowledge. The presented work extends optimal neuro-control to the multivariable case and shows the ?exibility of neural optimisers. Considering the preliminary results, it appears that neural networks can be used as embedded models for engine control, to satisfy the more and more restricting pollutant emission legislation. Particularly, they are able to model nonlinear dynamics and outperform during transients the control schemes based on static mappings.
* 15 pages