 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeV*: An Efficient Motion Planning Algorithm for Autonomous Vehicles
Aug 08, 2025Autonomous vehicle navigation in structured environments requires planners capable of generating time-optimal, collision-free trajectories that satisfy dynamic and kinematic constraints. We introduce V*, a graph-based motion planner that represents speed and direction as explicit state variables within a discretised space-time-velocity lattice. Unlike traditional methods that decouple spatial search from dynamic feasibility or rely on post-hoc smoothing, V* integrates both motion dimensions directly into graph construction through dynamic graph generation during search expansion. To manage the complexity of high-dimensional search, we employ a hexagonal discretisation strategy and provide formal mathematical proofs establishing optimal waypoint spacing and minimal node redundancy under constrained heading transitions for velocity-aware motion planning. We develop a mathematical formulation for transient steering dynamics in the kinematic bicycle model, modelling steering angle convergence with exponential behaviour, and deriving the relationship for convergence rate parameters. This theoretical foundation, combined with geometric pruning strategies that eliminate expansions leading to infeasible steering configurations, enables V* to evaluate dynamically admissible manoeuvres, ensuring each trajectory is physically realisable without further refinement. We further demonstrate V*'s performance in simulation studies with cluttered and dynamic environments involving moving obstacles, showing its ability to avoid conflicts, yield proactively, and generate safe, efficient trajectories with temporal reasoning capabilities for waiting behaviours and dynamic coordination.
Real-time and Large-scale Fleet Allocation of Autonomous Taxis: A Case Study in New York Manhattan Island
Sep 06, 2020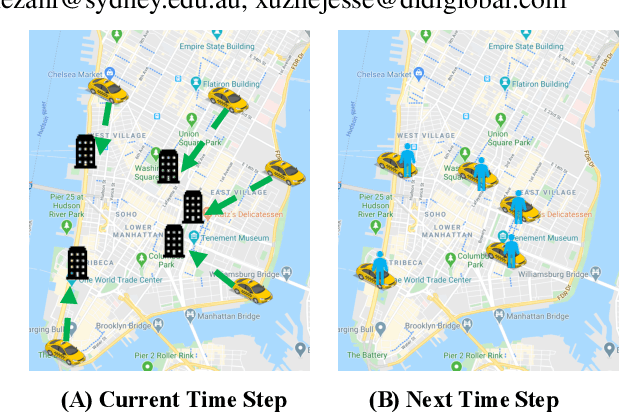
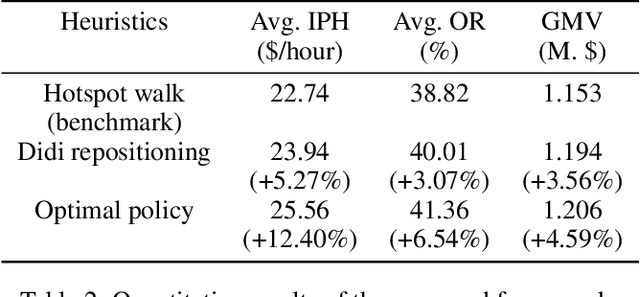
Nowadays, autonomous taxis become a highly promising transportation mode, which helps relieve traffic congestion and avoid road accidents. However, it hinders the wide implementation of this service that traditional models fail to efficiently allocate the available fleet to deal with the imbalance of supply (autonomous taxis) and demand (trips), the poor cooperation of taxis, hardly satisfied resource constraints, and on-line platform's requirements. To figure out such urgent problems from a global and more farsighted view, we employ a Constrained Multi-agent Markov Decision Processes (CMMDP) to model fleet allocation decisions, which can be easily split into sub-problems formulated as a 'Dynamic assignment problem' combining both immediate rewards and future gains. We also leverage a Column Generation algorithm to guarantee the efficiency and optimality in a large scale. Through extensive experiments, the proposed approach not only achieves remarkable improvements over the state-of-the-art benchmarks in terms of the individual's efficiency (arriving at 12.40%, 6.54% rise of income and utilization, respectively) and the platform's profit (reaching 4.59% promotion) but also reveals a time-varying fleet adjustment policy to minimize the operation cost of the platform.