 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHEART-VIT: Hessian-Guided Efficient Dynamic Attention and Token Pruning in Vision Transformer
Dec 23, 2025Vision Transformers (ViTs) deliver state-of-the-art accuracy but their quadratic attention cost and redundant computations severely hinder deployment on latency and resource-constrained platforms. Existing pruning approaches treat either tokens or heads in isolation, relying on heuristics or first-order signals, which often sacrifice accuracy or fail to generalize across inputs. We introduce HEART-ViT, a Hessian-guided efficient dynamic attention and token pruning framework for vision transformers, which to the best of our knowledge is the first unified, second-order, input-adaptive framework for ViT optimization. HEART-ViT estimates curvature-weighted sensitivities of both tokens and attention heads using efficient Hessian-vector products, enabling principled pruning decisions under explicit loss budgets.This dual-view sensitivity reveals an important structural insight: token pruning dominates computational savings, while head pruning provides fine-grained redundancy removal, and their combination achieves a superior trade-off. On ImageNet-100 and ImageNet-1K with ViT-B/16 and DeiT-B/16, HEART-ViT achieves up to 49.4 percent FLOPs reduction, 36 percent lower latency, and 46 percent higher throughput, while consistently matching or even surpassing baseline accuracy after fine-tuning, for example 4.7 percent recovery at 40 percent token pruning. Beyond theoretical benchmarks, we deploy HEART-ViT on different edge devices such as AGX Orin, demonstrating that our reductions in FLOPs and latency translate directly into real-world gains in inference speed and energy efficiency. HEART-ViT bridges the gap between theory and practice, delivering the first unified, curvature-driven pruning framework that is both accuracy-preserving and edge-efficient.
CAMP-HiVe: Cyclic Pair Merging based Efficient DNN Pruning with Hessian-Vector Approximation for Resource-Constrained Systems
Nov 09, 2025



Deep learning algorithms are becoming an essential component of many artificial intelligence (AI) driven applications, many of which run on resource-constrained and energy-constrained systems. For efficient deployment of these algorithms, although different techniques for the compression of neural network models are proposed, neural pruning is one of the fastest and effective methods, which can provide a high compression gain with minimal cost. To harness enhanced performance gain with respect to model complexity, we propose a novel neural network pruning approach utilizing Hessian-vector products that approximate crucial curvature information in the loss function, which significantly reduces the computation demands. By employing a power iteration method, our algorithm effectively identifies and preserves the essential information, ensuring a balanced trade-off between model accuracy and computational efficiency. Herein, we introduce CAMP-HiVe, a cyclic pair merging-based pruning with Hessian Vector approximation by iteratively consolidating weight pairs, combining significant and less significant weights, thus effectively streamlining the model while preserving its performance. This dynamic, adaptive framework allows for real-time adjustment of weight significance, ensuring that only the most critical parameters are retained. Our experimental results demonstrate that our proposed method achieves significant reductions in computational requirements while maintaining high performance across different neural network architectures, e.g., ResNet18, ResNet56, and MobileNetv2, on standard benchmark datasets, e.g., CIFAR10, CIFAR-100, and ImageNet, and it outperforms the existing state-of-the-art neural pruning methods.
Predicting Human Depression with Hybrid Data Acquisition utilizing Physical Activity Sensing and Social Media Feeds
May 28, 2025Mental disorders including depression, anxiety, and other neurological disorders pose a significant global challenge, particularly among individuals exhibiting social avoidance tendencies. This study proposes a hybrid approach by leveraging smartphone sensor data measuring daily physical activities and analyzing their social media (Twitter) interactions for evaluating an individual's depression level. Using CNN-based deep learning models and Naive Bayes classification, we identify human physical activities accurately and also classify the user sentiments. A total of 33 participants were recruited for data acquisition, and nine relevant features were extracted from the physical activities and analyzed with their weekly depression scores, evaluated using the Geriatric Depression Scale (GDS) questionnaire. Of the nine features, six are derived from physical activities, achieving an activity recognition accuracy of 95%, while three features stem from sentiment analysis of Twitter activities, yielding a sentiment analysis accuracy of 95.6%. Notably, several physical activity features exhibited significant correlations with the severity of depression symptoms. For classifying the depression severity, a support vector machine (SVM)-based algorithm is employed that demonstrated a very high accuracy of 94%, outperforming alternative models, e.g., the multilayer perceptron (MLP) and k-nearest neighbor. It is a simple approach yet highly effective in the long run for monitoring depression without breaching personal privacy.
Digital Twin in Safety-Critical Robotics Applications: Opportunities and Challenges
Sep 26, 2022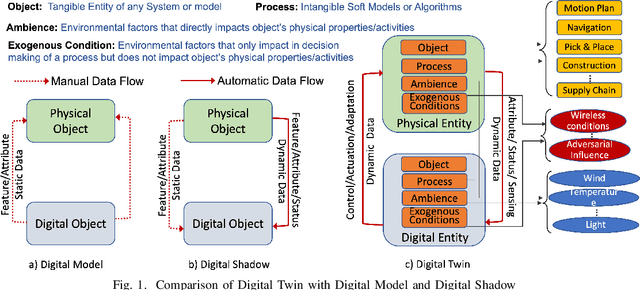
Digital Twin technology is being envisioned to be an integral part of the industrial evolution in modern generation. With the rapid advancement in the Internet-of-Things (IoT) technology and increasing trend of automation, integration between the virtual and the physical world is now realizable to produce practical digital twins. However, the existing definitions of digital twin is incomplete and sometimes ambiguous. Herein, we conduct historical review and analyze the modern generic view of digital twin to create its new extended definition. We also review and discuss the existing work in digital twin in safety-critical robotics applications. Especially, the usage of digital twin in industrial applications necessitates autonomous and remote operations due to environmental challenges. However, the uncertainties in the environment may need close monitoring and quick adaptation of the robots which need to be safety-proof and cost effective. We demonstrate a case study on developing a framework for safety-critical robotic arm applications and present the system performance to show its advantages, and discuss the challenges and scopes ahead.
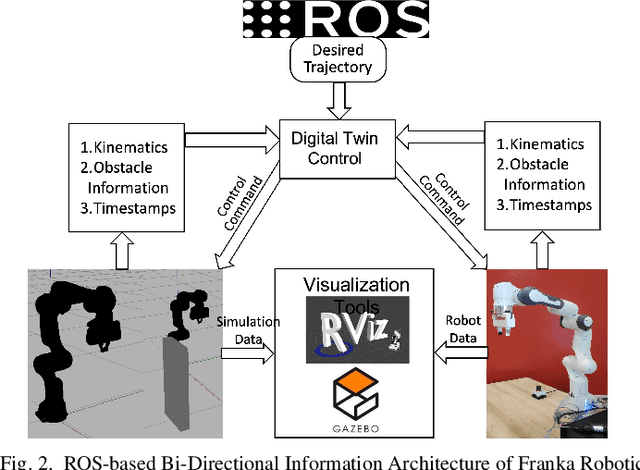
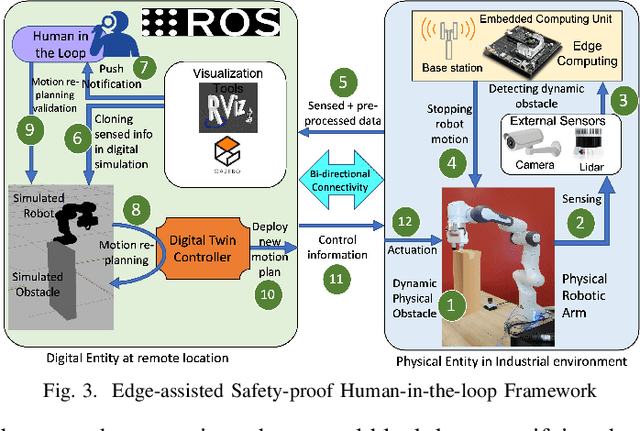
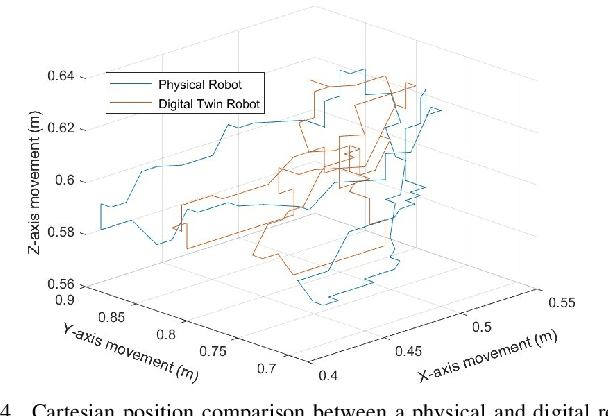
Edge-assisted Collaborative Digital Twin for Safety-Critical Robotics in Industrial IoT
Sep 26, 2022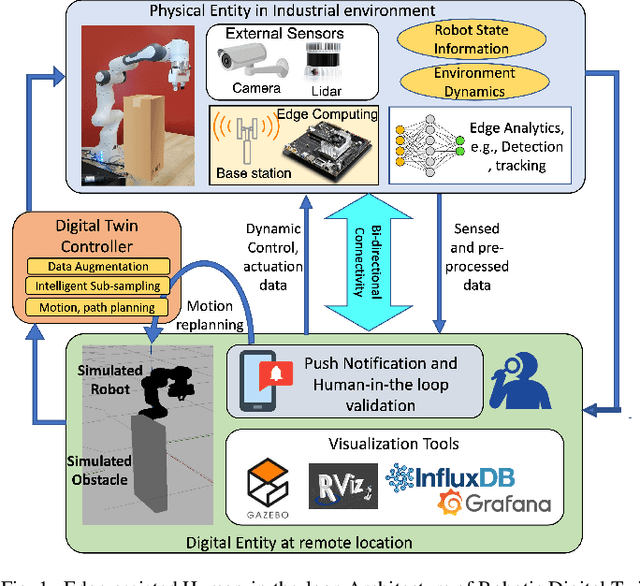
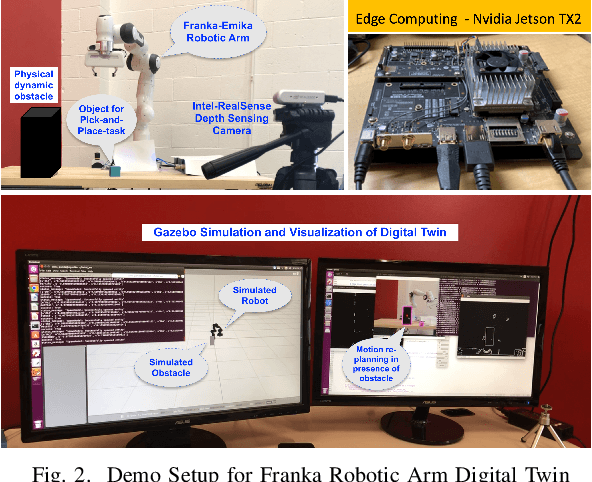
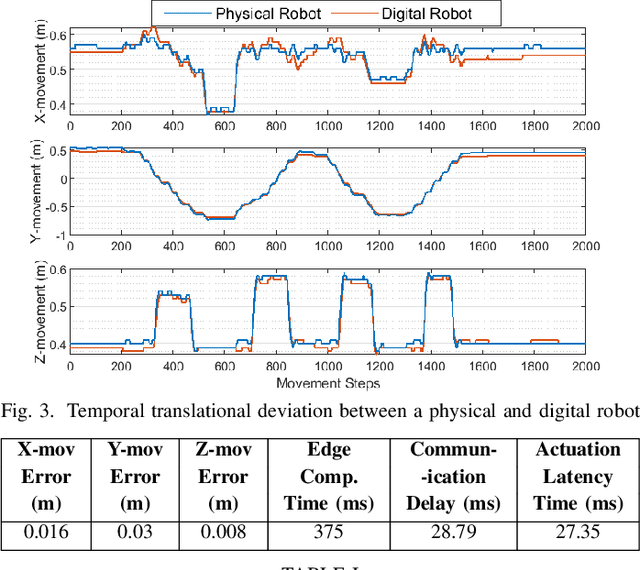
Digital Twin technology is playing a pivotal role in the modern industrial evolution. Especially, with the technological progress in the Internet-of-Things (IoT) and the increasing trend in autonomy, multi-sensor equipped robotics can create practical digital twin, which is particularly useful in the industrial applications for operations, maintenance and safety. Herein, we demonstrate a real-world digital twin of a safety-critical robotics applications with a Franka-Emika-Panda robotic arm. We develop and showcase an edge-assisted collaborative digital twin for dynamic obstacle avoidance which can be useful in real-time adaptation of the robots while operating in the uncertain and dynamic environments in industrial IoT.