 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Human-AI-Robot Collaboration and AI-Agent based Digital Twins for Parkinson's Disease Management: Review and Outlook
Nov 08, 2025



The current body of research on Parkinson's disease (PD) screening, monitoring, and management has evolved along two largely independent trajectories. The first research community focuses on multimodal sensing of PD-related biomarkers using noninvasive technologies such as inertial measurement units (IMUs), force/pressure insoles, electromyography (EMG), electroencephalography (EEG), speech and acoustic analysis, and RGB/RGB-D motion capture systems. These studies emphasize data acquisition, feature extraction, and machine learning-based classification for PD screening, diagnosis, and disease progression modeling. In parallel, a second research community has concentrated on robotic intervention and rehabilitation, employing socially assistive robots (SARs), robot-assisted rehabilitation (RAR) systems, and virtual reality (VR)-integrated robotic platforms for improving motor and cognitive function, enhancing social engagement, and supporting caregivers. Despite the complementary goals of these two domains, their methodological and technological integration remains limited, with minimal data-level or decision-level coupling between the two. With the advent of advanced artificial intelligence (AI), including large language models (LLMs), agentic AI systems, a unique opportunity now exists to unify these research streams. We envision a closed-loop sensor-AI-robot framework in which multimodal sensing continuously guides the interaction between the patient, caregiver, humanoid robot (and physician) through AI agents that are powered by a multitude of AI models such as robotic and wearables foundation models, LLM-based reasoning, reinforcement learning, and continual learning. Such closed-loop system enables personalized, explainable, and context-aware intervention, forming the basis for digital twin of the PD patient that can adapt over time to deliver intelligent, patient-centered PD care.
Contribution to the initialization of linear non-commensurate fractional-order systems for the joint estimation of parameters and fractional differentiation orders
Oct 18, 2022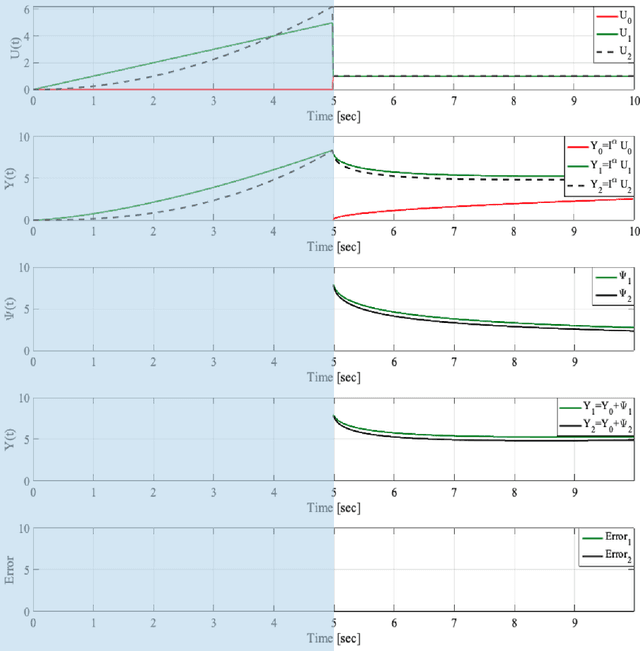
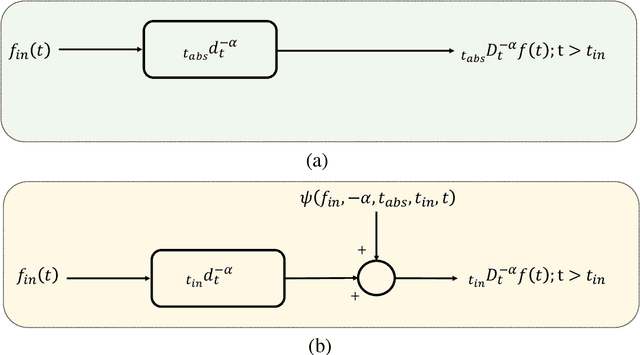
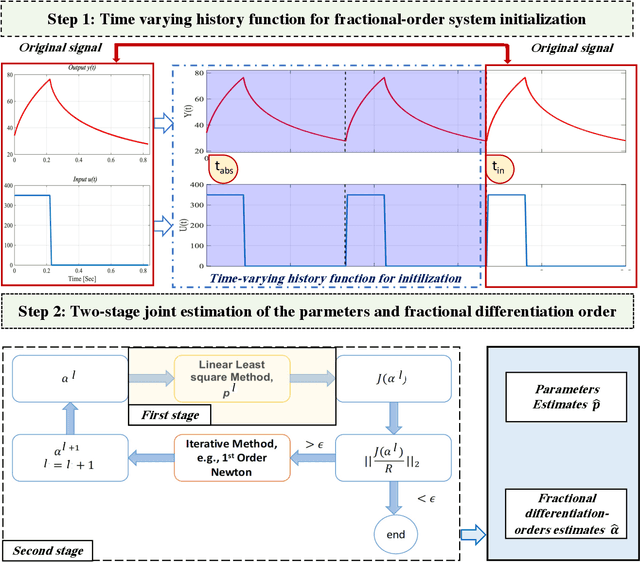
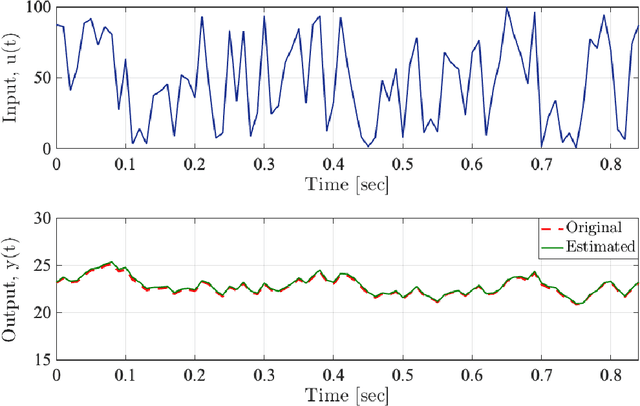
It has been recognized that using time-varying initialization functions to solve the initial value problem of fractional-order systems (FOS) is both complex and essential in defining the dynamical behavior of the states of FOSs. In this paper, we investigate the use of the initialization functions for the purpose of estimating unknown parameters of linear non-commensurate FOSs. In particular, we propose a novel "pre-initial" process that describes the dynamic characteristic of FOSs before the initial state and consists of designing an appropriate time-varying initialization function that ensures accurate convergence of the estimates of the unknown parameters. To do so, we propose an estimation technique that consists of two steps: (i) to design of practical initialization function that is output-dependent and which is employed; (ii) to solve the joint estimation problem of both parameters and fractional differentiation orders (FDOs). A convergence proof has been presented. The performance of the proposed method is illustrated through different numerical examples. Potential applications of the algorithm to joint estimation of parameters and FDOs of the fractional arterial Windkessel and neurovascular models are also presented using both synthetic and real data. The added value of the proposed "pre-initial" process to solve the studied estimation problem is shown through different simulation tests that investigate the sensitivity of estimation results using different time-varying initialization functions.