 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnytime Metaheuristic Framework for Global Route Optimization in Expected-Time Mobile Search
Dec 23, 2025Expected-time mobile search (ETS) is a fundamental robotics task where a mobile sensor navigates an environment to minimize the expected time required to locate a hidden object. Global route optimization for ETS in static 2D continuous environments remains largely underexplored due to the intractability of objective evaluation, stemming from the continuous nature of the environment and the interplay of motion and visibility constraints. Prior work has addressed this through partial discretization, leading to discrete-sensing formulations tackled via utility-greedy heuristics. Others have taken an indirect approach by heuristically approximating the objective using minimum latency problems on fixed graphs, enabling global route optimization via efficient metaheuristics. This paper builds on and significantly extends the latter by introducing Milaps (Minimum latency problems), a model-based solution framework for ETS. Milaps integrates novel auxiliary objectives and adapts a recent anytime metaheuristic for the traveling deliveryman problem, chosen for its strong performance under tight runtime constraints. Evaluations on a novel large-scale dataset demonstrate superior trade-offs between solution quality and runtime compared to state-of-the-art baselines. The best-performing strategy rapidly generates a preliminary solution, assigns static weights to sensing configurations, and optimizes global costs metaheuristically. Additionally, a qualitative study highlights the framework's flexibility across diverse scenarios.
Variable Neighborhood Search for the Electric Vehicle Routing Problem
Nov 11, 2025The Electric Vehicle Routing Problem (EVRP) extends the classical Vehicle Routing Problem (VRP) to reflect the growing use of electric and hybrid vehicles in logistics. Due to the variety of constraints considered in the literature, comparing approaches across different problem variants remains challenging. A minimalistic variant of the EVRP, known as the Capacitated Green Vehicle Routing Problem (CGVRP), was the focus of the CEC-12 competition held during the 2020 IEEE World Congress on Computational Intelligence. This paper presents the competition-winning approach, based on the Variable Neighborhood Search (VNS) metaheuristic. The method achieves the best results on the full competition dataset and also outperforms a more recent algorithm published afterward.
Optimizing Mesh to Improve the Triangular Expansion Algorithm for Computing Visibility Regions
Jun 05, 2025This paper addresses the problem of improving the query performance of the triangular expansion algorithm (TEA) for computing visibility regions by finding the most advantageous instance of the triangular mesh, the preprocessing structure. The TEA recursively traverses the mesh while keeping track of the visible region, the set of all points visible from a query point in a polygonal world. We show that the measured query time is approximately proportional to the number of triangle edge expansions during the mesh traversal. We propose a new type of triangular mesh that minimizes the expected number of expansions assuming the query points are drawn from a known probability distribution. We design a heuristic method to approximate the mesh and evaluate the approach on many challenging instances that resemble real-world environments. The proposed mesh improves the mean query times by 12-16% compared to the reference constrained Delaunay triangulation. The approach is suitable to boost offline applications that require computing millions of queries without addressing the preprocessing time. The implementation is publicly available to replicate our experiments and serve the community.
* 30 pages, 43 figures (including subfigures)
Visual Localization via Semantic Structures in Autonomous Photovoltaic Power Plant Inspection
Jan 24, 2025



Inspection systems utilizing unmanned aerial vehicles (UAVs) equipped with thermal cameras are increasingly popular for the maintenance of photovoltaic (PV) power plants. However, automation of the inspection task is a challenging problem as it requires precise navigation to capture images from optimal distances and viewing angles. This paper presents a novel localization pipeline that directly integrates PV module detection with UAV navigation, allowing precise positioning during inspection. Detections are used to identify the power plant structures in the image and associate these with the power plant model. We define visually recognizable anchor points for the initial association and use object tracking to discern global associations. We present three distinct methods for visual segmentation of PV modules based on traditional computer vision, deep learning, and their fusion, and we evaluate their performance in relation to the proposed localization pipeline. The presented methods were verified and evaluated using custom aerial inspection data sets, demonstrating their robustness and applicability for real-time navigation. Additionally, we evaluate the influence of the power plant model's precision on the localization methods.
Making a Complete Mess and Getting Away with it: Traveling Salesperson Problems with Circle Placement Variants
Oct 15, 2024



This paper explores a variation of the Traveling Salesperson Problem, where the agent places a circular obstacle next to each node once it visits it. Referred to as the Traveling Salesperson Problem with Circle Placement (TSP-CP), the aim is to maximize the obstacle radius for which a valid closed tour exists and then minimize the tour cost. The TSP-CP finds relevance in various real-world applications, such as harvesting, quarrying, and open-pit mining. We propose several novel solvers to address the TSP-CP, its variant tailored for Dubins vehicles, and a crucial subproblem known as the Traveling Salesperson Problem on self-deleting graphs (TSP-SD). Our extensive experimental results show that the proposed solvers outperform the current state-of-the-art on related problems in solution quality.
* 8 pages, 7 figures, accepted to IEEE Robotics and Automation Letters in August 2024
TřiVis: Versatile, Reliable, and High-Performance Tool for Computing Visibility in Polygonal Environments
Oct 11, 2024



Visibility is a fundamental concept in computational geometry, with numerous applications in robotics, surveillance systems, video games, and other fields. This software paper presents T\v{r}iVis, a C++ library developed by the authors for computing numerous visibility-related queries in highly complex polygonal environments. Adapting the triangular expansion algorithm (TEA), T\v{r}iVis stands out as a versatile, high-performance, more reliable and easy-to-use alternative to current solutions that is also free of heavy dependencies. Through evaluation on a challenging dataset, T\v{r}iVis has been benchmarked against existing visibility libraries. The results demonstrate that T\v{r}iVis outperforms the competing solutions by at least an order of magnitude in query times, while exhibiting more reliable runtime behavior. T\v{r}iVis is freely available for private, research, and institutional use at https://github.com/janmikulacz/trivis.
Hybrid Filtering Heuristic for the Sensor-Placement Problem to Discretize 2D Continuous Environments
Oct 11, 2024



This paper addresses the sensor-placement problem (SPP) within the context of discretizing large, complex continuous 2D environments into graphs for efficient task-oriented route planning. The SPP aims to minimize the number of sensors required to achieve a user-defined coverage ratio while considering a general visibility model. We propose the hybrid filtering heuristic (HFH) framework, which enhances or combines outputs of existing sensor-placement methods, incorporating a filtering step. This step eliminates redundant sensors or those contributing marginally to the coverage, ensuring the coverage ratio remains within the desired interval. We implement two versions of HFH: the basic version and a variant, HFHB, incorporating a preprocessing technique known as bucketing to accelerate region clipping. We evaluate HFH and HFHB on a dataset of large, complex polygonal environments, comparing them to several baseline methods under both unlimited and limited-range omnidirectional visibility models. The results demonstrate that HFH and HFHB outperform baselines in terms of the number of sensors required to achieve the desired coverage ratio. Additionally, HFHB significantly reduces the runtime of more competitive baseline methods. We also adapt HFHB to a visibility model with localization uncertainty, demonstrating its effectiveness up to a certain level of uncertainty.
Making a Mess and Getting Away with it: Traveling Salesperson Problem with Circle Placement for Dubins Vehicles
Oct 11, 2024This paper explores a variation of the Traveling Salesperson Problem, where the agent places a circular obstacle next to each node once it visits it. Referred to as the Traveling Salesperson Problem with Circle Placement (TSP-CP), the aim is to maximize the obstacle radius for which a valid closed tour exists and then minimize the tour cost. The TSP-CP finds relevance in various real-world applications, such as harvesting, quarrying, and open-pit mining. We propose several novel solvers to address the TSP-CP, its variant tailored for Dubins vehicles, and a crucial subproblem known as the Traveling Salesperson Problem on self-deleting graphs (TSP-SD). Our extensive experimental results show that the proposed solvers outperform the current state-of-the-art on related problems in solution quality.
* 8 pages, 7 figures, submitted to IEEE Robotics and Automation Letters
Push, Stop, and Replan: An Application of Pebble Motion on Graphs to Planning in Automated Warehouses
Jul 20, 2020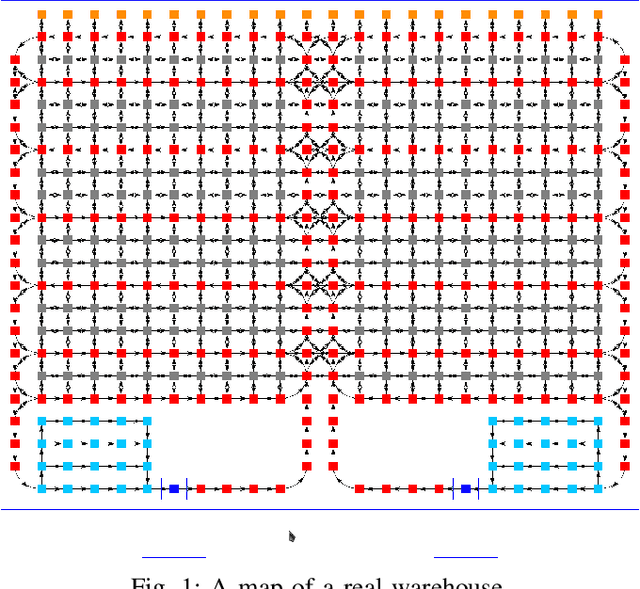
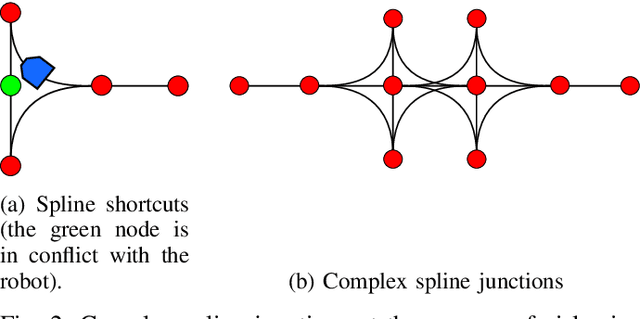
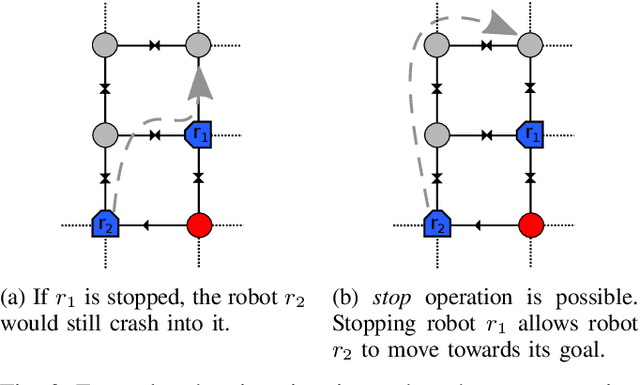
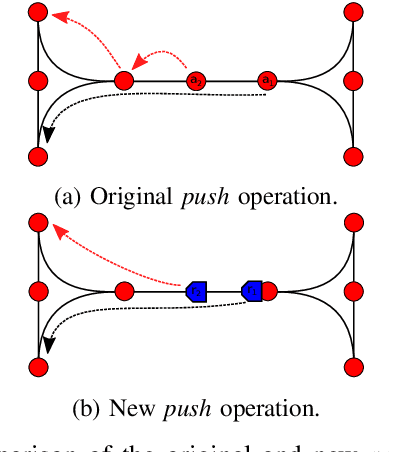
The pebble-motion on graphs is a subcategory of multi-agent pathfinding problems dealing with moving multiple pebble-like objects from a node to a node in a graph with a constraint that only one pebble can occupy one node at a given time. Additionally, algorithms solving this problem assume that individual pebbles (robots) cannot move at the same time and their movement is discrete. These assumptions disqualify them from being directly used in practical applications, although they have otherwise nice theoretical properties. We present modifications of the Push and Rotate algorithm [1], which relax the presumptions mentioned above and demonstrate, through a set of experiments, that the modified algorithm is applicable for planning in automated warehouses.
An Integrated Approach to Goal Selection in Mobile Robot Exploration
Jul 20, 2020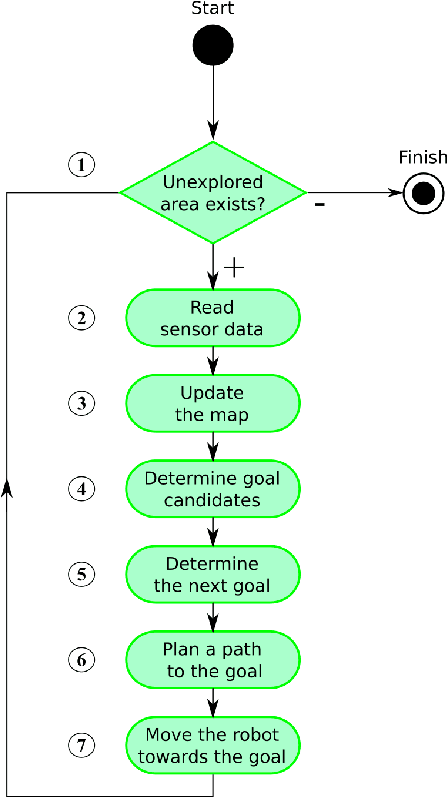
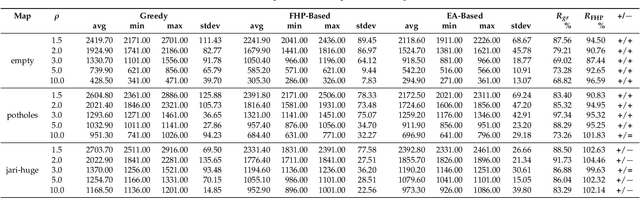
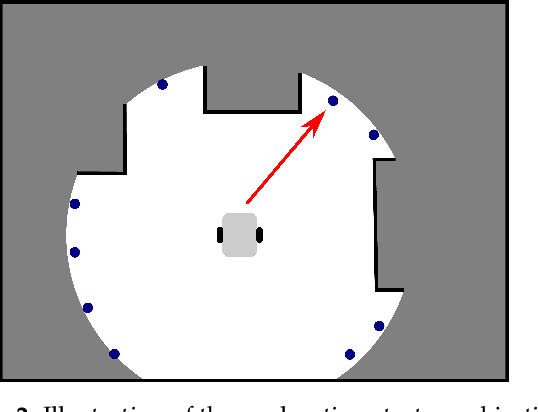
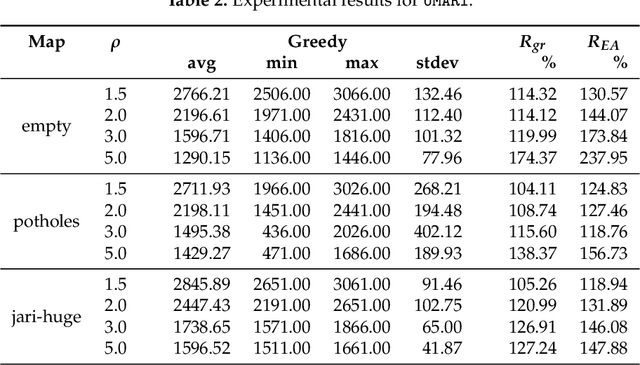
This paper deals with the problem of autonomous navigation of a mobile robot in an unknown 2D environment to fully explore the environment as efficiently as possible. We assume a terrestrial mobile robot equipped with a ranging sensor with a limited range and 360 degrees field of view. The key part of the exploration process is formulated as the d-Watchman Route Problem which consists of two coupled tasks - candidate goals generation and finding an optimal path through a subset of goals - which are solved in each exploration step. The latter has been defined as a constrained variant of the Generalized Traveling Salesman Problem and solved using an evolutionary algorithm. An evolutionary algorithm that uses an indirect representation and the nearest neighbor based constructive procedure was proposed to solve this problem. Individuals evolved in this evolutionary algorithm do not directly code the solutions to the problem. Instead, they represent sequences of instructions to construct a feasible solution. The problems with efficiently generating feasible solutions typically arising when applying traditional evolutionary algorithms to constrained optimization problems are eliminated this way. The proposed exploration framework was evaluated in a simulated environment on three maps and the time needed to explore the whole environment was compared to state-of-the-art exploration methods. Experimental results show that our method outperforms the compared ones in environments with a low density of obstacles by up to 12.5%, while it is slightly worse in office-like environments by 4.5% at maximum. The framework has also been deployed on a real robot to demonstrate the applicability of the proposed solution with real hardware.