 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHKD-SHO: A hybrid smart home system based on knowledge-based and data-driven services
Feb 15, 2024A smart home is realized by setting up various services. Several methods have been proposed to create smart home services, which can be divided into knowledge-based and data-driven approaches. However, knowledge-based approaches usually require manual input from the inhabitant, which can be complicated if the physical phenomena of the concerned environment states are complex, and the inhabitant does not know how to adjust related actuators to achieve the target values of the states monitored by services. Moreover, machine learning-based data-driven approaches that we are interested in are like black boxes and cannot show the inhabitant in which situations certain services proposed certain actuators' states. To solve these problems, we propose a hybrid system called HKD-SHO (Hybrid Knowledge-based and Data-driven services based Smart HOme system), where knowledge-based and machine learning-based data-driven services are profitably integrated. The principal advantage is that it inherits the explicability of knowledge-based services and the dynamism of data-driven services. We compare HKD-SHO with several systems for creating dynamic smart home services, and the results show the better performance of HKD-SHO.
PBRE: A Rule Extraction Method from Trained Neural Networks Designed for Smart Home Services
Jul 18, 2022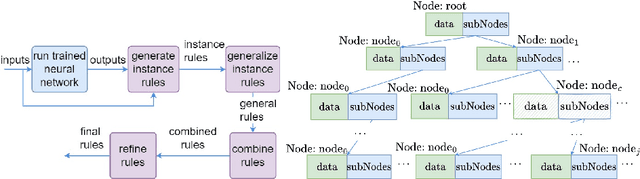
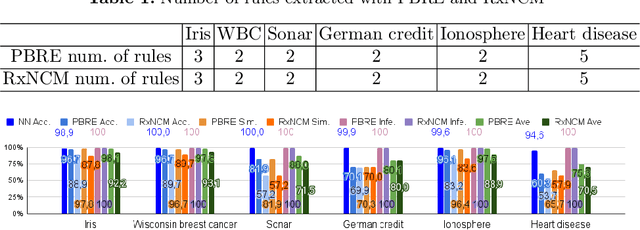
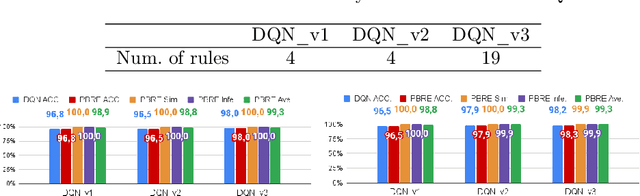

Designing smart home services is a complex task when multiple services with a large number of sensors and actuators are deployed simultaneously. It may rely on knowledge-based or data-driven approaches. The former can use rule-based methods to design services statically, and the latter can use learning methods to discover inhabitants' preferences dynamically. However, neither of these approaches is entirely satisfactory because rules cannot cover all possible situations that may change, and learning methods may make decisions that are sometimes incomprehensible to the inhabitant. In this paper, PBRE (Pedagogic Based Rule Extractor) is proposed to extract rules from learning methods to realize dynamic rule generation for smart home systems. The expected advantage is that both the explainability of rule-based methods and the dynamicity of learning methods are adopted. We compare PBRE with an existing rule extraction method, and the results show better performance of PBRE. We also apply PBRE to extract rules from a smart home service represented by an NRL (Neural Network-based Reinforcement Learning). The results show that PBRE can help the NRL-simulated service to make understandable suggestions to the inhabitant.
Observation Error Covariance Specification in Dynamical Systems for Data assimilation using Recurrent Neural Networks
Nov 11, 2021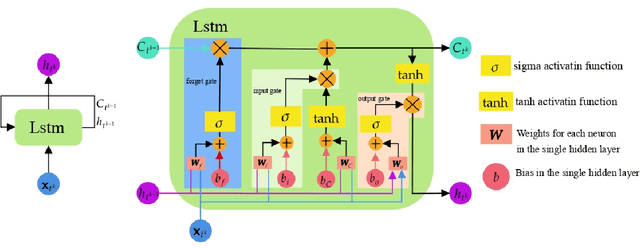

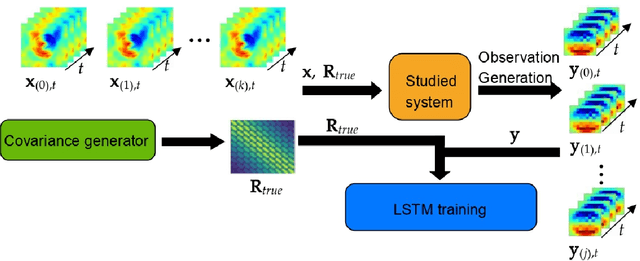

Data assimilation techniques are widely used to predict complex dynamical systems with uncertainties, based on time-series observation data. Error covariance matrices modelling is an important element in data assimilation algorithms which can considerably impact the forecasting accuracy. The estimation of these covariances, which usually relies on empirical assumptions and physical constraints, is often imprecise and computationally expensive especially for systems of large dimension. In this work, we propose a data-driven approach based on long short term memory (LSTM) recurrent neural networks (RNN) to improve both the accuracy and the efficiency of observation covariance specification in data assimilation for dynamical systems. Learning the covariance matrix from observed/simulated time-series data, the proposed approach does not require any knowledge or assumption about prior error distribution, unlike classical posterior tuning methods. We have compared the novel approach with two state-of-the-art covariance tuning algorithms, namely DI01 and D05, first in a Lorenz dynamical system and then in a 2D shallow water twin experiments framework with different covariance parameterization using ensemble assimilation. This novel method shows significant advantages in observation covariance specification, assimilation accuracy and computational efficiency.