 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan LLMs Prove Robotic Path Planning Optimality? A Benchmark for Research-Level Algorithm Verification
Mar 19, 2026Robotic path planning problems are often NP-hard, and practical solutions typically rely on approximation algorithms with provable performance guarantees for general cases. While designing such algorithms is challenging, formally proving their approximation optimality is even more demanding, which requires domain-specific geometric insights and multi-step mathematical reasoning over complex operational constraints. Recent Large Language Models (LLMs) have demonstrated strong performance on mathematical reasoning benchmarks, yet their ability to assist with research-level optimality proofs in robotic path planning remains under-explored. In this work, we introduce the first benchmark for evaluating LLMs on approximation-ratio proofs of robotic path planning algorithms. The benchmark consists of 34 research-grade proof tasks spanning diverse planning problem types and complexity levels, each requiring structured reasoning over algorithm descriptions, problem constraints, and theoretical guarantees. Our evaluation of state-of-the-art proprietary and open-source LLMs reveals that even the strongest models struggle to produce fully valid proofs without external domain knowledge. However, providing LLMs with task-specific in-context lemmas substantially improves reasoning quality, a factor that is more effective than generic chain-of-thought prompting or supplying the ground-truth approximation ratio as posterior knowledge. We further provide fine-grained error analysis to characterize common logical failures and hallucinations, and demonstrate how each error type can be mitigated through targeted context augmentation.
Predicting Energy Consumption of Ground Robots On Uneven Terrains
Dec 13, 2022



Optimizing energy consumption for robot navigation in fields requires energy-cost maps. However, obtaining such a map is still challenging, especially for large, uneven terrains. Physics-based energy models work for uniform, flat surfaces but do not generalize well to these terrains. Furthermore, slopes make the energy consumption at every location directional and add to the complexity of data collection and energy prediction. In this paper, we address these challenges in a data-driven manner. We consider a function which takes terrain geometry and robot motion direction as input and outputs expected energy consumption. The function is represented as a ResNet-based neural network whose parameters are learned from field-collected data. The prediction accuracy of our method is within 12% of the ground truth in our test environments that are unseen during training. We compare our method to a baseline method in the literature: a method using a basic physics-based model. We demonstrate that our method significantly outperforms it by more than 10% measured by the prediction error. More importantly, our method generalizes better when applied to test data from new environments with various slope angles and navigation directions.
Energy-efficient Path Planning for Ground Robots by Combining Air and Ground Measurements
Jul 15, 2019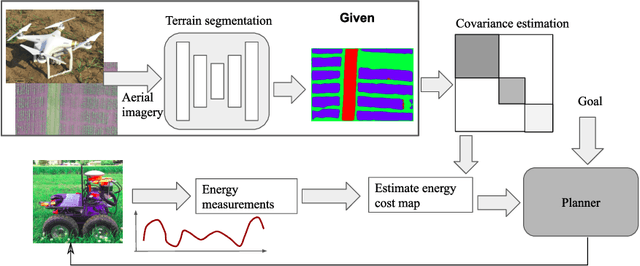

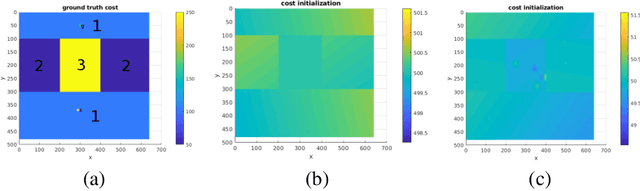
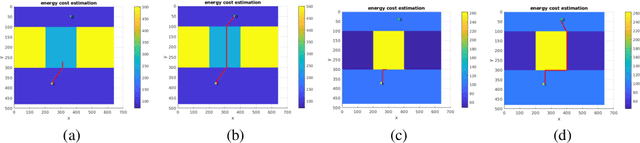
As mobile robots find increasing use in outdoor applications, designing energy-efficient robot navigation algorithms is gaining importance. There are two primary approaches to energy efficient navigation: Offline approaches rely on a previously built energy map as input to a path planner. Obtaining energy maps for large environments is challenging. Alternatively, the robot can navigate in an online fashion and build the map as it navigates. Online navigation in unknown environments with only local information is still a challenging research problem. In this paper, we present a novel approach which addresses both of these challenges. Our approach starts with a segmented aerial image of the environment. We show that a coarse energy map can be built from the segmentation. However, the absolute energy value for a specific terrain type (e.g. grass) can vary across environments. Therefore, rather than using this energy map directly, we use it to build the covariance function for a Gaussian Process (GP) based representation of the environment. In the online phase, energy measurements collected during navigation are used for estimating energy profiles across the environment using GP regression. Coupled with an A*-like navigation algorithm, we show in simulations that our approach outperforms representative baseline approaches. We also present results from field experiments which demonstrate the practical applicability of our method.