 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Evaluation of an Assisted Programming Interface for Behavior Trees in Robotics
Feb 10, 2026The possibility to create reactive robot programs faster without the need for extensively trained programmers is becoming increasingly important. So far, it has not been explored how various techniques for creating Behavior Tree (BT) program representations could be combined with complete graphical user interfaces (GUIs) to allow a human user to validate and edit trees suggested by automated methods. In this paper, we introduce BEhavior TRee GUI (BETR-GUI) for creating BTs with the help of an AI assistant that combines methods using large language models, planning, genetic programming, and Bayesian optimization with a drag-and-drop editor. A user study with 60 participants shows that by combining different assistive methods, BETR-GUI enables users to perform better at solving the robot programming tasks. The results also show that humans using the full variant of BETR-GUI perform better than the AI assistant running on its own.
Probabilistic Bubble Roadmap
Feb 22, 2025Finding a collision-free path is a fundamental problem in robotics, where the sampling based planners have a long line of success. However, this approach is computationally expensive, due to the frequent use of collision-detection. Furthermore, the produced paths are usually jagged and require further post-processing before they can be tracked. Due to their high computational cost, these planners are usually restricted to static settings, since they are not able to cope with rapid changes in the environment. In our work, we remove this restriction by introducing a learned signed distance function expressed in the configuration space of the robot. The signed distance allows us to form collision-free spherical regions in the configuration space, which we use to suggest a new multi-query path planner that also works in dynamic settings. We propose the probabilistic bubble roadmap planner, which enhances the probabilistic roadmap planner (PRM) by using spheres as vertices and compute the edges by checking for neighboring spheres which intersect. We benchmark our approach in a static setting where we show that we can produce paths that are shorter than the paths produced by the PRM, while having a smaller sized roadmap and finding the paths faster. Finally, we show that we can rapidly rewire the graph in the case of new obstacles introduced at run time and therefore produce paths in the case of moving obstacles.
Time-Optimal Path Tracking for Cooperative Manipulators: A Convex Optimization Approach
Mar 13, 2023



This paper studies the time-optimal path tracking problem for a team of cooperating robotic manipulators carrying an object. Considering the problem for rigidly grasped objects, we show that it can be cast as a convex optimization problem and solved efficiently with a guarantee of optimality. When formulating the problem, we avoid using a particular wrench distribution and exploit the full actuation available to the system. Then, we consider the problem for grasps using frictional forces and show that this problem also, under a force-closure grasp assumption, can be formulated as a convex optimization problem and solved efficiently and to optimality. To ensure a firm grasp, internal forces have been taken into account in this approach.
Combining Planning and Learning of Behavior Trees for Robotic Assembly
Mar 16, 2021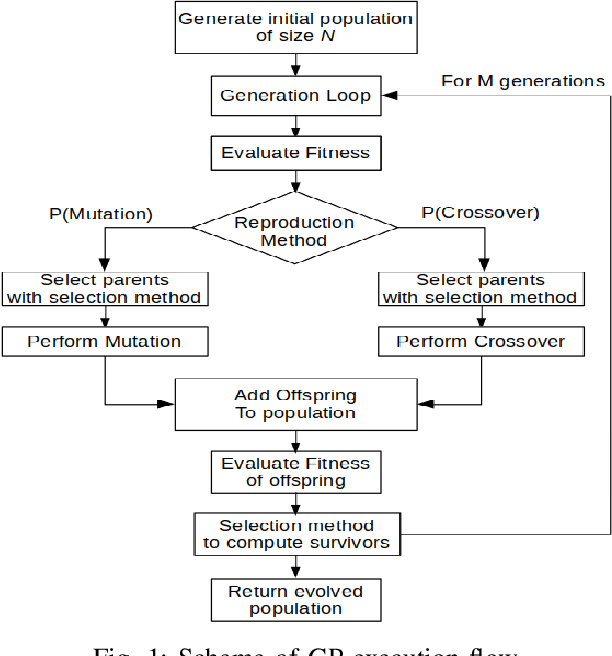
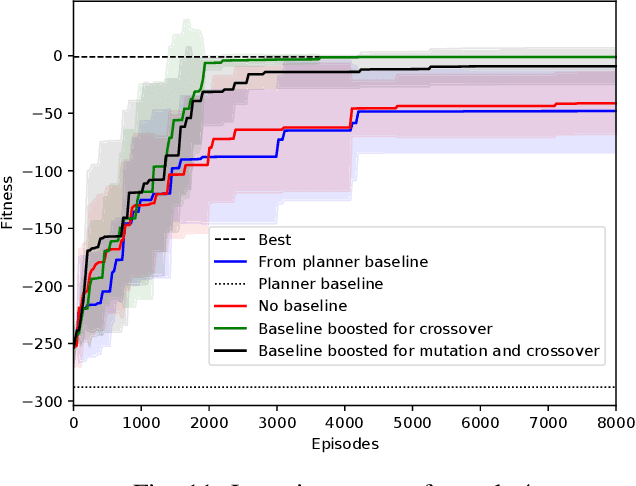
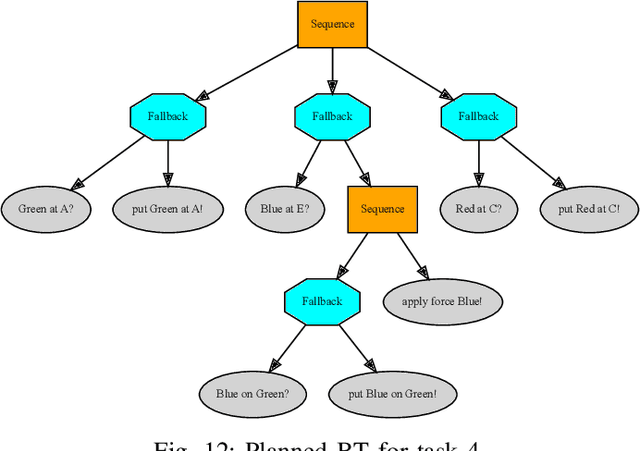
Industrial robots can solve very complex tasks in controlled environments, but modern applications require robots able to operate in unpredictable surroundings as well. An increasingly popular reactive policy architecture in robotics is Behavior Trees but as with other architectures, programming time still drives cost and limits flexibility. There are two main branches of algorithms to generate policies automatically, automated planning and machine learning, both with their own drawbacks. We propose a method for generating Behavior Trees using a Genetic Programming algorithm and combining the two branches by taking the result of an automated planner and inserting it into the population. Experimental results confirm that the proposed method of combining planning and learning performs well on a variety of robotic assembly problems and outperforms both of the base methods used separately. We also show that this type of high level learning of Behavior Trees can be transferred to a real system without further training.