 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCAR: Satellite Imagery-Based Calibration for Aerial Recordings
Feb 18, 2026We introduce SCAR, a method for long-term auto-calibration refinement of aerial visual-inertial systems that exploits georeferenced satellite imagery as a persistent global reference. SCAR estimates both intrinsic and extrinsic parameters by aligning aerial images with 2D--3D correspondences derived from publicly available orthophotos and elevation models. In contrast to existing approaches that rely on dedicated calibration maneuvers or manually surveyed ground control points, our method leverages external geospatial data to detect and correct calibration degradation under field deployment conditions. We evaluate our approach on six large-scale aerial campaigns conducted over two years under diverse seasonal and environmental conditions. Across all sequences, SCAR consistently outperforms established baselines (Kalibr, COLMAP, VINS-Mono), reducing median reprojection error by a large margin, and translating these calibration gains into substantially lower visual localization rotation errors and higher pose accuracy. These results demonstrate that SCAR provides accurate, robust, and reproducible calibration over long-term aerial operations without the need for manual intervention.
VPAIR -- Aerial Visual Place Recognition and Localization in Large-scale Outdoor Environments
May 23, 2022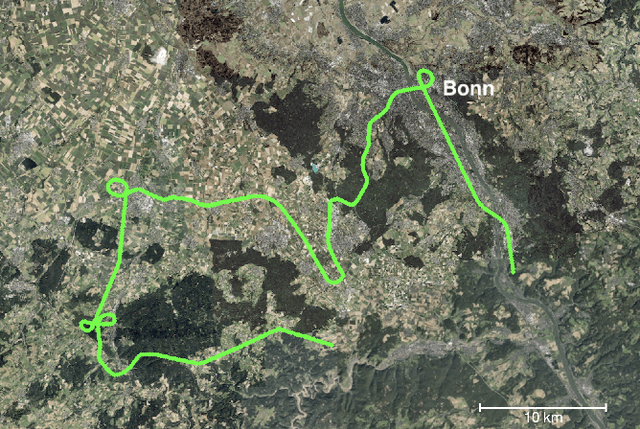
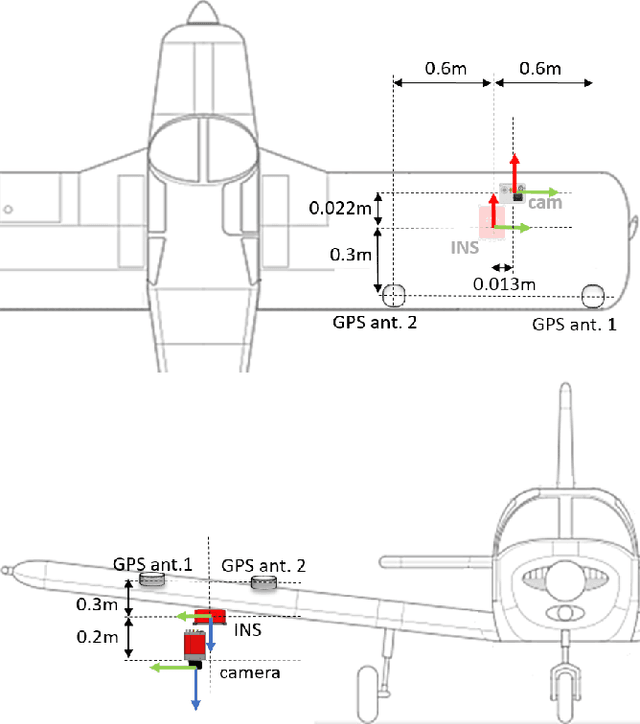
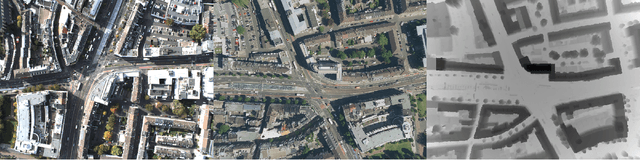
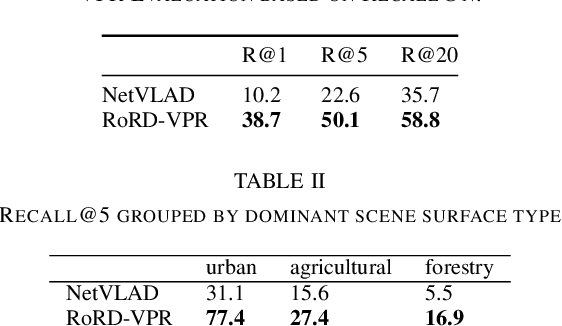
Visual Place Recognition and Visual Localization are essential components in navigation and mapping for autonomous vehicles especially in GNSS-denied navigation scenarios. Recent work has focused on ground or close to ground applications such as self-driving cars or indoor-scenarios and low-altitude drone flights. However, applications such as Urban Air Mobility require operations in large-scale outdoor environments at medium to high altitudes. We present a new dataset named VPAIR. The dataset was recorded on board a light aircraft flying at an altitude of more than 300 meters above ground capturing images with a downwardfacing camera. Each image is paired with a high resolution reference render including dense depth information and 6-DoF reference poses. The dataset covers a more than one hundred kilometers long trajectory over various types of challenging landscapes, e.g. urban, farmland and forests. Experiments on this dataset illustrate the challenges introduced by the change in perspective to a bird's eye view such as in-plane rotations.