 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA technique to jointly estimate depth and depth uncertainty for unmanned aerial vehicles
May 31, 2023When used by autonomous vehicles for trajectory planning or obstacle avoidance, depth estimation methods need to be reliable. Therefore, estimating the quality of the depth outputs is critical. In this paper, we show how M4Depth, a state-of-the-art depth estimation method designed for unmanned aerial vehicle (UAV) applications, can be enhanced to perform joint depth and uncertainty estimation. For that, we present a solution to convert the uncertainty estimates related to parallax generated by M4Depth into uncertainty estimates related to depth, and show that it outperforms the standard probabilistic approach. Our experiments on various public datasets demonstrate that our method performs consistently, even in zero-shot transfer. Besides, our method offers a compelling value when compared to existing multi-view depth estimation methods as it performs similarly on a multi-view depth estimation benchmark despite being 2.5 times faster and causal, as opposed to other methods. The code of our method is publicly available at https://github.com/michael-fonder/M4DepthU .
M4Depth: A motion-based approach for monocular depth estimation on video sequences
May 21, 2021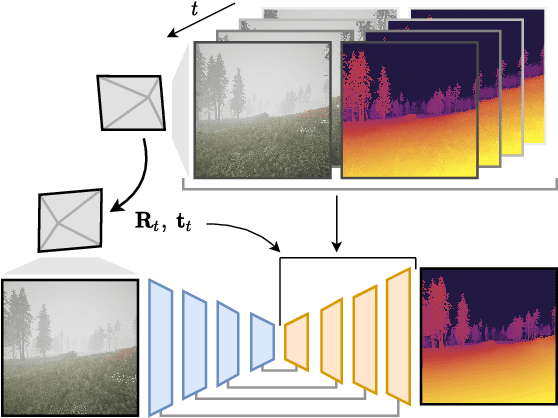
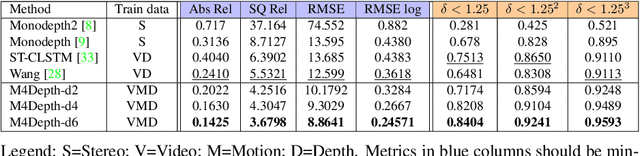
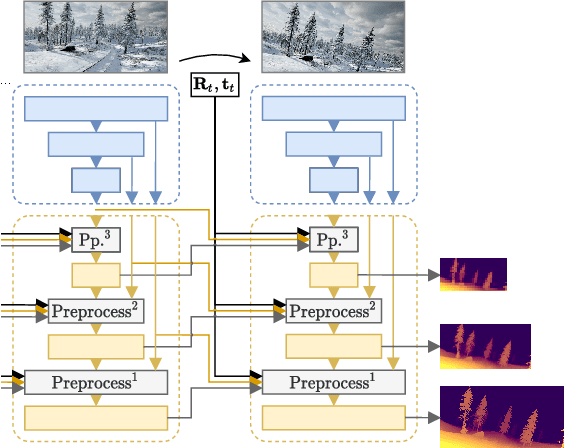
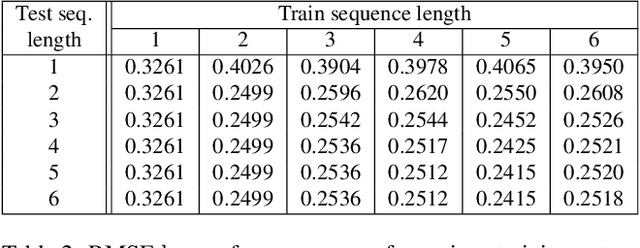
Getting the distance to objects is crucial for autonomous vehicles. In instances where depth sensors cannot be used, this distance has to be estimated from RGB cameras. As opposed to cars, the task of estimating depth from on-board mounted cameras is made complex on drones because of the lack of constrains on motion during flights. In this paper, we present a method to estimate the distance of objects seen by an on-board mounted camera by using its RGB video stream and drone motion information. Our method is built upon a pyramidal convolutional neural network architecture and uses time recurrence in pair with geometric constraints imposed by motion to produce pixel-wise depth maps. In our architecture, each level of the pyramid is designed to produce its own depth estimate based on past observations and information provided by the previous level in the pyramid. We introduce a spatial reprojection layer to maintain the spatio-temporal consistency of the data between the levels. We analyse the performance of our approach on Mid-Air, a public drone dataset featuring synthetic drone trajectories recorded in a wide variety of unstructured outdoor environments. Our experiments show that our network outperforms state-of-the-art depth estimation methods and that the use of motion information is the main contributing factor for this improvement. The code of our method is publicly available on GitHub; see https://github.com/michael-fonder/M4Depth