 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptNet: Rethinking Sensing and Communication for a Seamless Internet of Drones Experience
May 12, 2024



In the evolving era of Unmanned Aerial Vehicles (UAVs), the emphasis has moved from mere data collection to strategically obtaining timely and relevant data within the Internet of Drones (IoDs) ecosystem. However, the unpredictable conditions in dynamic IoDs pose safety challenges for drones. Addressing this, our approach introduces a multi-UAV framework using spatial-temporal clustering and the Frechet distance for enhancing reliability. Seamlessly coupled with Integrated Sensing and Communication (ISAC), it enhances the precision and agility of UAV networks. Our Multi-Agent Reinforcement Learning (MARL) mechanism ensures UAVs adapt strategies through ongoing environmental interactions and enhancing intelligent sensing. This focus ensures operational safety and efficiency, considering data capture and transmission viability. By evaluating the relevance of the sensed information, we can communicate only the most crucial data variations beyond a set threshold and optimize bandwidth usage. Our methodology transforms the UAV domain, transitioning drones from data gatherers to adept information orchestrators, establishing a benchmark for efficiency and adaptability in modern aerial systems.
AquaIntellect: A Semantic Self-learning Framework for Underwater Internet of Things Connectivity
May 12, 2024The emerging paradigm of Non-Conventional Internet of Things (NC IoT), which is focused on the usefulness of information as opposed to the notion of high volume data collection and transmission, will be an important and dominant part of human life in the near future. This paper proposes a novel semantic-based approach for addressing the unique challenges posed by underwater NC IoT. We present an intelligent sensing strategy for exploring the semantics of the underwater environment by judiciously selecting the data to transmit, thereby minimizing redundancy for utmost relevant data transmission. We introduce an evolutionary function for the selection of the semantic-empowered messages relevant to the specific task within a minimum Age of Information (AoI), a freshness metric of the collected information, and for monitoring the underwater environment for performance optimization. A DNN-empowered Bayesian integrated with an adaptive surrogate model optimization will determine the optimal placement strategy of the sensors and the uncertainty level of the underwater landscape. An Adaptive Expected Improvement (AEI) mechanism is introduced to predict the optimal arrival rate for enabling a synchronized data sensing and transmission ecosystem, ensuring efficiency and timeliness. Simulation results show that the proposed solution outperforms conventional approaches.
Source Feature Compression for Object Classification in Vision-Based Underwater Robotics
Dec 28, 2021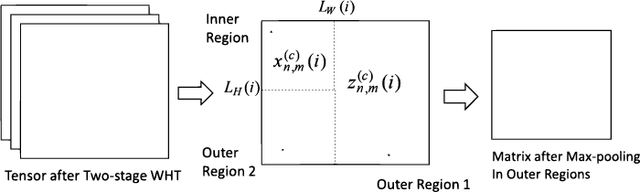
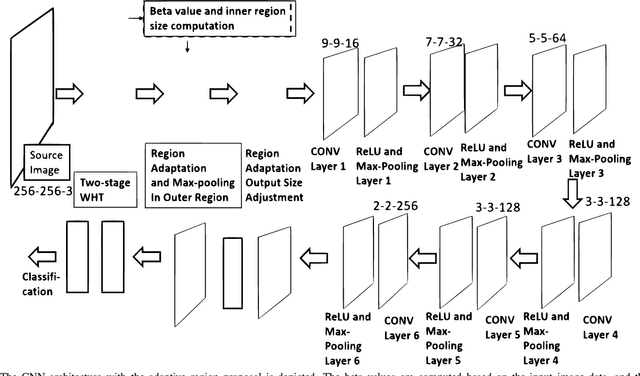
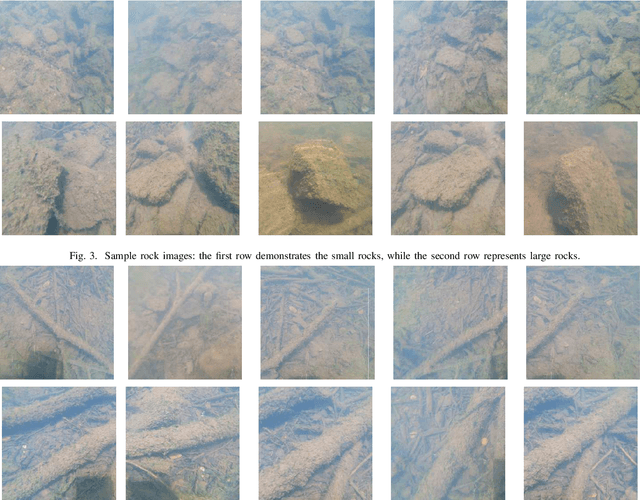
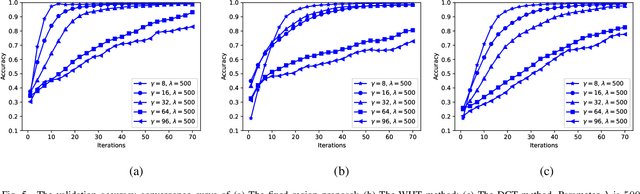
New efficient source feature compression solutions are proposed based on a two-stage Walsh-Hadamard Transform (WHT) for Convolutional Neural Network (CNN)-based object classification in underwater robotics. The object images are firstly transformed by WHT following a two-stage process. The transform-domain tensors have large values concentrated in the upper left corner of the matrices in the RGB channels. By observing this property, the transform-domain matrix is partitioned into inner and outer regions. Consequently, two novel partitioning methods are proposed in this work: (i) fixing the size of inner and outer regions; and (ii) adjusting the size of inner and outer regions adaptively per image. The proposals are evaluated with an underwater object dataset captured from the Raritan River in New Jersey, USA. It is demonstrated and verified that the proposals reduce the training time effectively for learning-based underwater object classification task and increase the accuracy compared with the competing methods. The object classification is an essential part of a vision-based underwater robot that can sense the environment and navigate autonomously. Therefore, the proposed method is well-suited for efficient computer vision-based tasks in underwater robotics applications.
Location-aware Beamforming for MIMO-enabled UAV Communications: An Unknown Input Observer Approach
Nov 20, 2021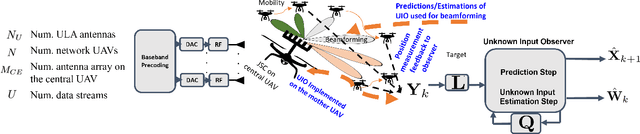
Numerous communications and networking challenges prevent deploying unmanned aerial vehicles (UAVs) in extreme environments where the existing wireless technologies are mainly ground-focused; and, as a consequence, the air-to-air channel for UAVs is not fully covered. In this paper, a novel spatial estimation for beamforming is proposed to address UAV-based joint sensing and communications (JSC). The proposed spatial estimation algorithm relies on using a delay tolerant observer-based predictor, which can accurately predict the positions of the target UAVs in the presence of uncertainties due to factors such as wind gust. The solution, which uses discrete-time unknown input observers (UIOs), reduces the joint target detection and communication complication notably by operating on the same device and performs reliably in the presence of channel blockage and interference. The effectiveness of the proposed approach is demonstrated using simulation results.