 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSegmentation of Drone Collision Hazards in Airborne RADAR Point Clouds Using PointNet
Nov 06, 2023

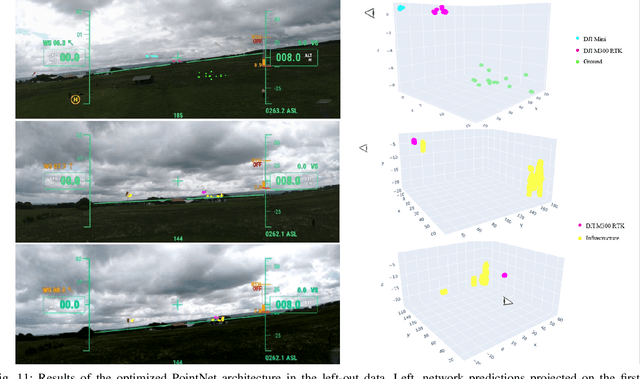

The integration of unmanned aerial vehicles (UAVs) into shared airspace for beyond visual line of sight (BVLOS) operations presents significant challenges but holds transformative potential for sectors like transportation, construction, energy and defense. A critical prerequisite for this integration is equipping UAVs with enhanced situational awareness to ensure safe operations. Current approaches mainly target single object detection or classification, or simpler sensing outputs that offer limited perceptual understanding and lack the rapid end-to-end processing needed to convert sensor data into safety-critical insights. In contrast, our study leverages radar technology for novel end-to-end semantic segmentation of aerial point clouds to simultaneously identify multiple collision hazards. By adapting and optimizing the PointNet architecture and integrating aerial domain insights, our framework distinguishes five distinct classes: mobile drones (DJI M300 and DJI Mini) and airplanes (Ikarus C42), and static returns (ground and infrastructure) which results in enhanced situational awareness for UAVs. To our knowledge, this is the first approach addressing simultaneous identification of multiple collision threats in an aerial setting, achieving a robust 94% accuracy. This work highlights the potential of radar technology to advance situational awareness in UAVs, facilitating safe and efficient BVLOS operations.
Cross-Platform Performance Portability Using Highly Parametrized SYCL Kernels
Apr 10, 2019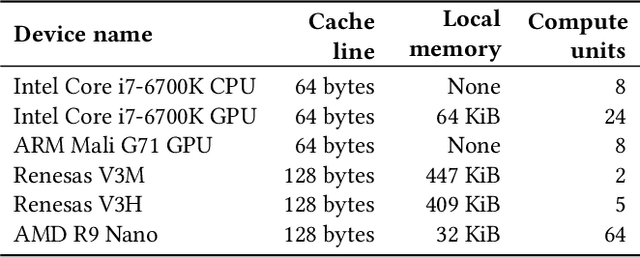
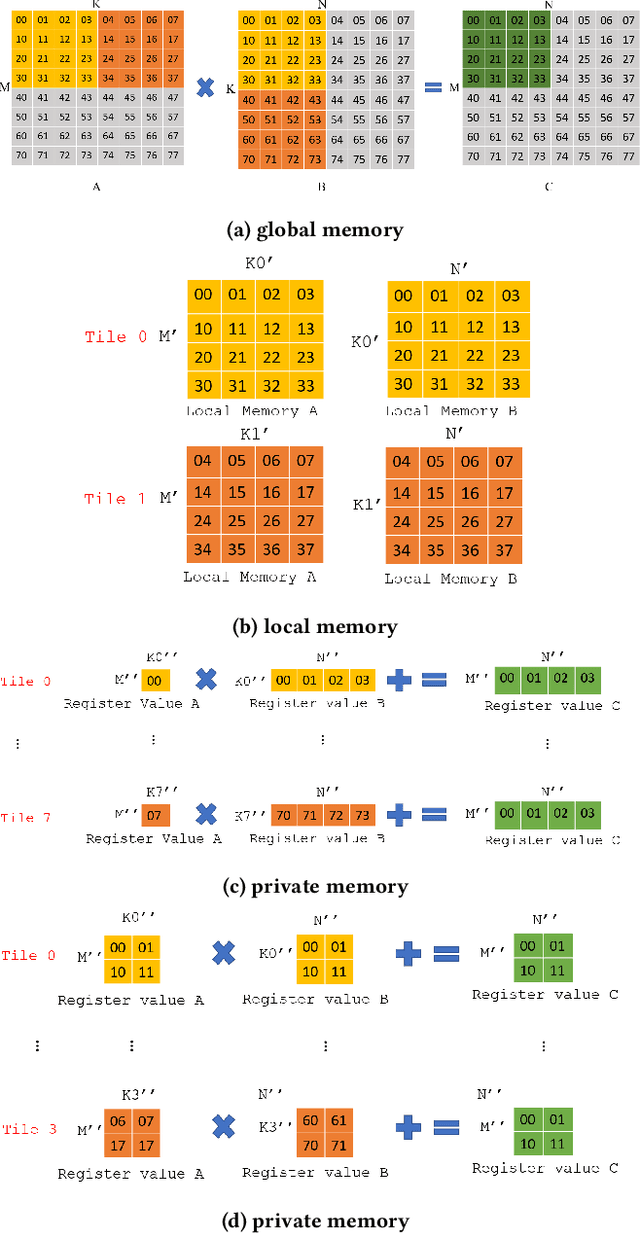
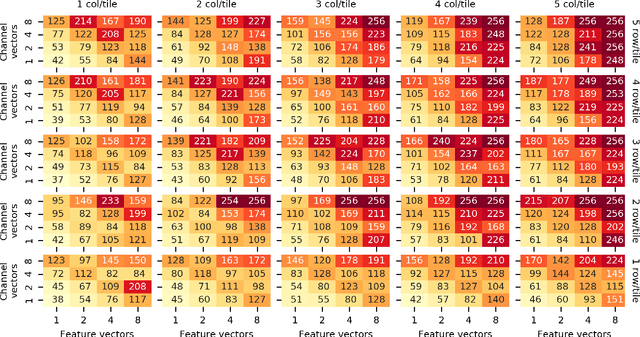
Over recent years heterogeneous systems have become more prevalent across HPC systems, with over 100 supercomputers in the TOP500 incorporating GPUs or other accelerators. These hardware platforms have different performance characteristics and optimization requirements. In order to make the most of multiple accelerators a developer has to provide implementations of their algorithms tuned for each device. Hardware vendors provide libraries targeting their devices specifically, which provide good performance but frequently have different API designs, hampering portability. The SYCL programming model allows users to write heterogeneous programs using completely standard C++, and so developers have access to the power of C++ templates when developing compute kernels. In this paper we show that by writing highly parameterized kernels for matrix multiplies and convolutions we achieve performance competitive with vendor implementations across different architectures. Furthermore, tuning for new devices amounts to choosing the combinations of kernel parameters that perform best on the hardware.