 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Grading of Written Answers in Low-Resource Language Bangla Using a Fine-Tuned Lightweight Language Model
Jun 10, 2026Bangla is among the world's most widely spoken languages, yet it remains underserved in educational NLP research. In many remote and rural regions, access to qualified subject teachers is limited, and written answers are consequently graded largely by hand, restricting timely and consistent feedback. Automatic assessment is challenging because semantically correct responses can vary substantially in surface form. We present a bilingual (Bangla-English) evaluation system designed for low-resource educational settings that prioritizes semantic correctness over lexical overlap. Our approach fine-tunes a lightweight language model to grade each response using the question, reference answer, and student answer, producing a numeric score and concise, context-grounded feedback suitable for classroom deployment. We also construct a synthetic bilingual dataset to enable controlled training and evaluation. Across proprietary and open-source LLMs evaluated under a unified protocol, our QLoRA-tuned Qwen3-8B confirms consistent improvement by producing the most leakage-resistant feedback (RoRa = 0.819) in synthetic evaluation and the strongest agreement with human scores (rho = 0.936, MAE = 0.725) in a dedicated human study.
Temporal Sheaf Neural Networks with Dynamic Orthogonal Transport
Jun 08, 2026We introduce Temporal Sheaf Neural Networks (TSNN), a temporal link prediction framework that equips each node with a time-varying orthogonal frame and compares node states only after explicit transport between local coordinate systems. In contrast to existing continuous-time graph models that operate in a shared global embedding space, TSNN models node-specific and evolving interaction semantics through dynamic local frames. The model parameterizes per-node frames via efficient low-rank Householder products, preserves stored hidden states exactly under frame updates, and uses a geometric-residual decoder that anchors predictions on transported distances while learning residual corrections. All computations are strictly causal and use only the pre-event history. We show that the symmetric degree-normalized sheaf Laplacian is orthogonally similar to the symmetric normalized graph Laplacian, with the random-walk normalized form similar in the corresponding degree metric; the full-active, feature-scaled diffusion used by TSNN is exactly a metric-gradient step on the combinatorial sheaf Dirichlet energy, with a degree-free monotone-descent and non-expansiveness guarantee. Frame drift perturbs updates only linearly. Across TGB v2 link-prediction and temporal-heterogeneous leaderboards, together with the DGB benchmark suite, TSNN matches or surpasses the strongest prior methods on most benchmarks, with the largest improvements on graphs exhibiting strong node-role heterogeneity. Ablations confirm the distinct benefit of dynamic frames, orthogonal transport, and geometric-residual decoding.
From Attention to Frequency: Integration of Vision Transformer and FFT-ReLU for Enhanced Image Deblurring
Nov 13, 2025Image deblurring is vital in computer vision, aiming to recover sharp images from blurry ones caused by motion or camera shake. While deep learning approaches such as CNNs and Vision Transformers (ViTs) have advanced this field, they often struggle with complex or high-resolution blur and computational demands. We propose a new dual-domain architecture that unifies Vision Transformers with a frequency-domain FFT-ReLU module, explicitly bridging spatial attention modeling and frequency sparsity. In this structure, the ViT backbone captures local and global dependencies, while the FFT-ReLU component enforces frequency-domain sparsity to suppress blur-related artifacts and preserve fine details. Extensive experiments on benchmark datasets demonstrate that this architecture achieves superior PSNR, SSIM, and perceptual quality compared to state-of-the-art models. Both quantitative metrics, qualitative comparisons, and human preference evaluations confirm its effectiveness, establishing a practical and generalizable paradigm for real-world image restoration.
Deblurring in the Wild: A Real-World Dataset from Smartphone High-Speed Videos
Jun 24, 2025We introduce the largest real-world image deblurring dataset constructed from smartphone slow-motion videos. Using 240 frames captured over one second, we simulate realistic long-exposure blur by averaging frames to produce blurry images, while using the temporally centered frame as the sharp reference. Our dataset contains over 42,000 high-resolution blur-sharp image pairs, making it approximately 10 times larger than widely used datasets, with 8 times the amount of different scenes, including indoor and outdoor environments, with varying object and camera motions. We benchmark multiple state-of-the-art (SOTA) deblurring models on our dataset and observe significant performance degradation, highlighting the complexity and diversity of our benchmark. Our dataset serves as a challenging new benchmark to facilitate robust and generalizable deblurring models.
Decentralized Cooperation in Heterogeneous Multi-Agent Reinforcement Learning via Graph Neural Network-Based Intrinsic Motivation
Aug 12, 2024



Multi-agent Reinforcement Learning (MARL) is emerging as a key framework for various sequential decision-making and control tasks. Unlike their single-agent counterparts, multi-agent systems necessitate successful cooperation among the agents. The deployment of these systems in real-world scenarios often requires decentralized training, a diverse set of agents, and learning from infrequent environmental reward signals. These challenges become more pronounced under partial observability and the lack of prior knowledge about agent heterogeneity. While notable studies use intrinsic motivation (IM) to address reward sparsity or cooperation in decentralized settings, those dealing with heterogeneity typically assume centralized training, parameter sharing, and agent indexing. To overcome these limitations, we propose the CoHet algorithm, which utilizes a novel Graph Neural Network (GNN) based intrinsic motivation to facilitate the learning of heterogeneous agent policies in decentralized settings, under the challenges of partial observability and reward sparsity. Evaluation of CoHet in the Multi-agent Particle Environment (MPE) and Vectorized Multi-Agent Simulator (VMAS) benchmarks demonstrates superior performance compared to the state-of-the-art in a range of cooperative multi-agent scenarios. Our research is supplemented by an analysis of the impact of the agent dynamics model on the intrinsic motivation module, insights into the performance of different CoHet variants, and its robustness to an increasing number of heterogeneous agents.
Blind Image Deblurring using FFT-ReLU with Deep Learning Pipeline Integration
Jun 12, 2024



Blind image deblurring is the process of deriving a sharp image and a blur kernel from a blurred image. Blurry images are typically modeled as the convolution of a sharp image with a blur kernel, necessitating the estimation of the unknown blur kernel to perform blind image deblurring effectively. Existing approaches primarily focus on domain-specific features of images, such as salient edges, dark channels, and light streaks. These features serve as probabilistic priors to enhance the estimation of the blur kernel. For improved generality, we propose a novel prior (ReLU sparsity prior) that estimates blur kernel effectively across all distributions of images (natural, facial, text, low-light, saturated etc). Our approach demonstrates superior efficiency, with inference times up to three times faster, while maintaining high accuracy in PSNR, SSIM, and error ratio metrics. We also observe noticeable improvement in the performance of the state-of-the-art architectures (in terms of aforementioned metrics) in deep learning based approaches when our method is used as a post-processing unit.
A Graph Neural Network-Based QUBO-Formulated Hamiltonian-Inspired Loss Function for Combinatorial Optimization using Reinforcement Learning
Nov 27, 2023Quadratic Unconstrained Binary Optimization (QUBO) is a generic technique to model various NP-hard Combinatorial Optimization problems (CO) in the form of binary variables. Ising Hamiltonian is used to model the energy function of a system. QUBO to Ising Hamiltonian is regarded as a technique to solve various canonical optimization problems through quantum optimization algorithms. Recently, PI-GNN, a generic framework, has been proposed to address CO problems over graphs based on Graph Neural Network (GNN) architecture. They introduced a generic QUBO-formulated Hamiltonian-inspired loss function that was directly optimized using GNN. PI-GNN is highly scalable but there lies a noticeable decrease in the number of satisfied constraints when compared to problem-specific algorithms and becomes more pronounced with increased graph densities. Here, We identify a behavioral pattern related to it and devise strategies to improve its performance. Another group of literature uses Reinforcement learning (RL) to solve the aforementioned NP-hard problems using problem-specific reward functions. In this work, we also focus on creating a bridge between the RL-based solutions and the QUBO-formulated Hamiltonian. We formulate and empirically evaluate the compatibility of the QUBO-formulated Hamiltonian as the generic reward function in the RL-based paradigm in the form of rewards. Furthermore, we also introduce a novel Monty Carlo Tree Search-based strategy with GNN where we apply a guided search through manual perturbation of node labels during training. We empirically evaluated our methods and observed up to 44% improvement in the number of constraint violations compared to the PI-GNN.
DePAint: A Decentralized Safe Multi-Agent Reinforcement Learning Algorithm considering Peak and Average Constraints
Oct 22, 2023



The field of safe multi-agent reinforcement learning, despite its potential applications in various domains such as drone delivery and vehicle automation, remains relatively unexplored. Training agents to learn optimal policies that maximize rewards while considering specific constraints can be challenging, particularly in scenarios where having a central controller to coordinate the agents during the training process is not feasible. In this paper, we address the problem of multi-agent policy optimization in a decentralized setting, where agents communicate with their neighbors to maximize the sum of their cumulative rewards while also satisfying each agent's safety constraints. We consider both peak and average constraints. In this scenario, there is no central controller coordinating the agents and both the rewards and constraints are only known to each agent locally/privately. We formulate the problem as a decentralized constrained multi-agent Markov Decision Problem and propose a momentum-based decentralized policy gradient method, DePAint, to solve it. To the best of our knowledge, this is the first privacy-preserving fully decentralized multi-agent reinforcement learning algorithm that considers both peak and average constraints. We also provide theoretical analysis and empirical evaluation of our algorithm in various scenarios and compare its performance to centralized algorithms that consider similar constraints.
Understanding the Usage of QUBO-based Hamiltonian Function in Combinatorial Optimization over Graphs: A Discussion Using Max Cut (MC) Problem
Aug 27, 2023



Quadratic Unconstrained Binary Optimization (QUBO) is a generic technique to model various NP-hard combinatorial optimization problems in the form of binary variables. The Hamiltonian function is often used to formulate QUBO problems where it is used as the objective function in the context of optimization. In this study, we investigate how reinforcement learning-based (RL) paradigms with the presence of the Hamiltonian function can address combinatorial optimization problems over graphs in QUBO formulations. We use Graph Neural Network (GNN) as the message-passing architecture to convey the information among the nodes. We have centered our discussion on QUBO formulated Max-Cut problem but the intuitions can be extended to any QUBO supported canonical NP-Hard combinatorial optimization problems. We mainly investigate three formulations, Monty-Carlo Tree Search with GNN-based RL (MCTS-GNN), DQN with GNN-based RL, and a generic GNN with attention-based RL (GRL). Our findings state that in the RL-based paradigm, the Hamiltonian function-based optimization in QUBO formulation brings model convergence and can be used as a generic reward function. We also analyze and present the performance of our RL-based setups through experimenting over graphs of different densities and compare them with a simple GNN-based setup in the light of constraint violation, learning stability and computation cost. As per one of our findings, all the architectures provide a very comparable performance in sparse graphs as per the number of constraint violation whreas MCTS-GNN gives the best performance. In the similar criteria, the performance significantly starts to drop both for GRL and simple GNN-based setups whereas MCTS-GNN and DQN shines. We also present the corresponding mathematical formulations and in-depth discussion of the observed characteristics during experimentations.
Improving Causal Effect Estimation of Weighted RegressionBased Estimator using Neural Networks
Oct 28, 2021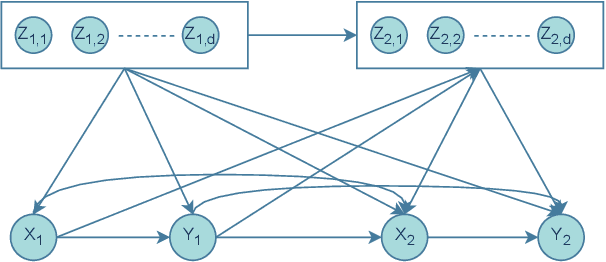
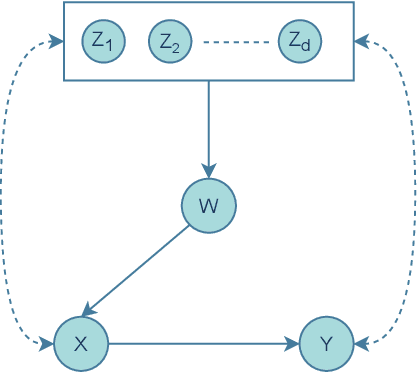
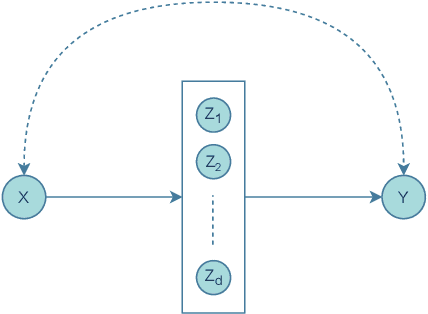
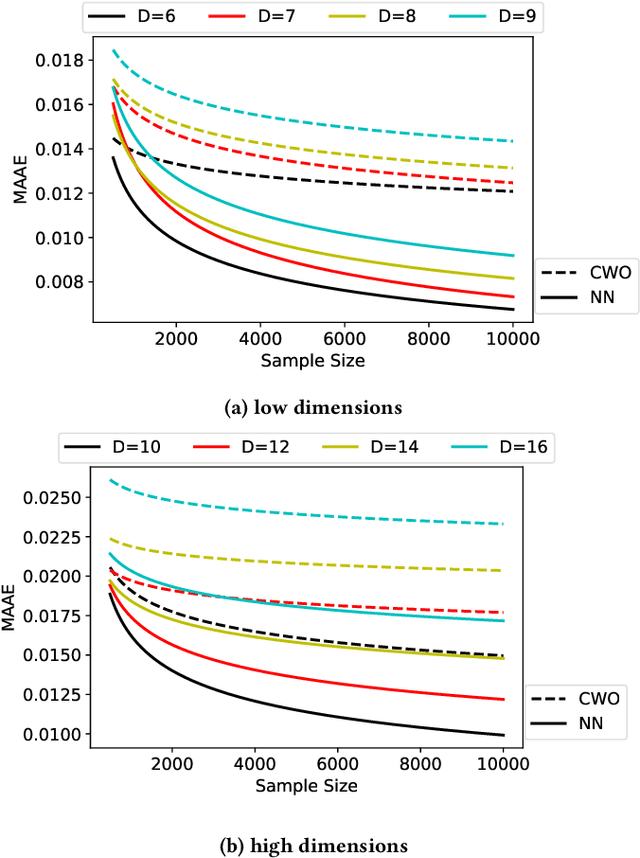
Estimating causal effects from observational data informs us about which factors are important in an autonomous system, and enables us to take better decisions. This is important because it has applications in selecting a treatment in medical systems or making better strategies in industries or making better policies for our government or even the society. Unavailability of complete data, coupled with high cardinality of data, makes this estimation task computationally intractable. Recently, a regression-based weighted estimator has been introduced that is capable of producing solution using bounded samples of a given problem. However, as the data dimension increases, the solution produced by the regression-based method degrades. Against this background, we introduce a neural network based estimator that improves the solution quality in case of non-linear and finitude of samples. Finally, our empirical evaluation illustrates a significant improvement of solution quality, up to around $55\%$, compared to the state-of-the-art estimators.