 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentifying Explicit Parsimonious Piece-wise Polynomial Relationships in Industrial time-series: Application to manipulator robots
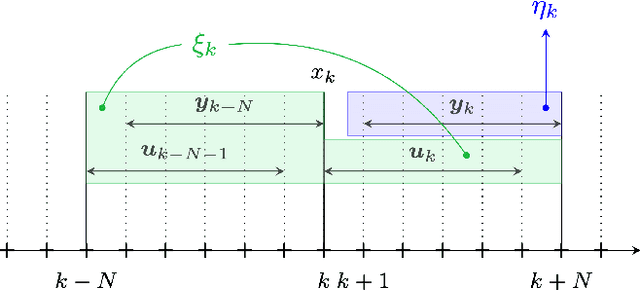
May 27, 2026This paper addresses the problem of identifying parsimonious explicit piece-wise polynomial relationships that might involve a relatively large number of raw features. The algorithm leverages a recently proposed identification algorithm that yields parsimonious implicit relationships enabling to derive normality characterization in the context of anomaly detection and localization. The algorithm proposed in this paper goes a step further by deriving explicit piece-wise representations that are built using the set of polynomials involved in the implicit representations. The framework is illustrated on the problem of identifying parsimonious explicit representations of the inverse model of a 6-axis manipulator robot. Moreover, further experiments on a 4-axis robot are also shown which are designed to investigate the generalization capability of parsimonious models compared to state-of-the-art DNNs structures, when models face unseen contexts of use.
How is remifentanil dosed without dedicated indicator?
Dec 22, 2025This study investigates the paradigm of intraoperative analgesic dosage using a data-driven approach based on retrospective clinical data. Remifentanil, an analgesic widely used during anesthesia, presents a dosing challenge due to the absence of an universally accepted indicator of analgesia. To examine how changes in patient state correlate with adjustments in remifentanil target concentration triggered by the practitioner, we analyzed data from two sources: VitalDB (Seoul, Korea) and PREDIMED (Grenoble, France). Results show that only features derived from arterial pressure are consistently associated with changes in remifentanil targets. This finding is robust across both datasets despite variations in specific thresholds. In particular, increases in remifentanil targets are associated with high or rising arterial pressure over short periods (1--2 minutes), whereas decreases are linked to low, stable, or declining arterial pressure over longer periods (5--7 minutes). By capturing anesthesiologists' dosing strategies we provide a foundation for the future development of closed-loop control algorithms. Beyond the specific example of remifentanil's change prediction, the proposed feature generation and associated sparse fitting approach can be applied to other domain where human decision can be viewed as sensors interpretation.
Learning-Based sensitivity analysis and feedback design for drug delivery of mixed therapy of cancer in the presence of high model uncertainties
May 16, 2022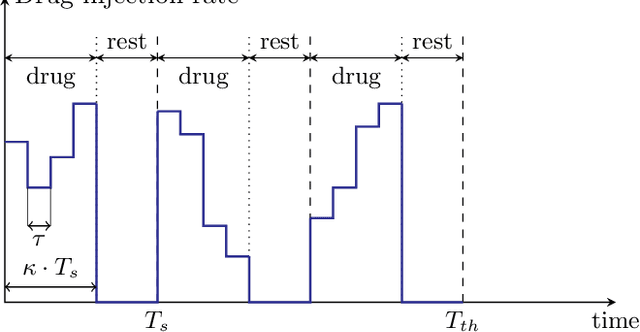
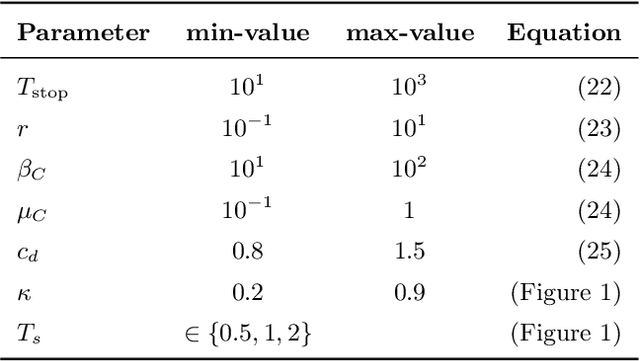
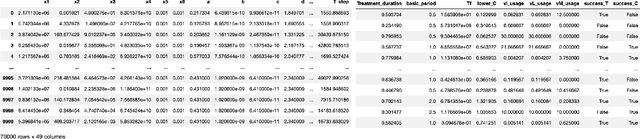
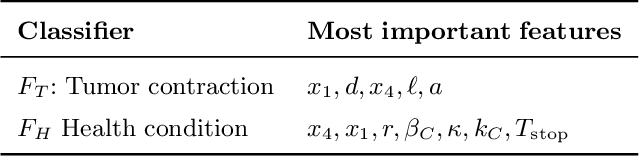
In this paper, a methodology is proposed that enables to analyze the sensitivity of the outcome of a therapy to unavoidable high dispersion of the patient specific parameters on one hand and to the choice of the parameters that define the drug delivery feedback strategy on the other hand. More precisely, a method is given that enables to extract and rank the most influent parameters that determine the probability of success/failure of a given feedback therapy for a given set of initial conditions over a cloud of realizations of uncertainties. Moreover predictors of the expectations of the amounts of drugs being used can also be derived. This enables to design an efficient stochastic optimization framework that guarantees safe contraction of the tumor while minimizing a weighted sum of the quantities of the different drugs being used. The framework is illustrated and validated using the example of a mixed therapy of cancer involving three combined drugs namely: a chemotherapy drug, an immunology vaccine and an immunotherapy drug. Finally, in this specific case, it is shown that dash-boards can be built in the 2D-space of the most influent state components that summarize the outcomes' probabilities and the associated drug usage as iso-values curves in the reduced state space.
A Heuristic for Dynamic Output Predictive Control Design for Uncertain Nonlinear Systems
Feb 03, 2021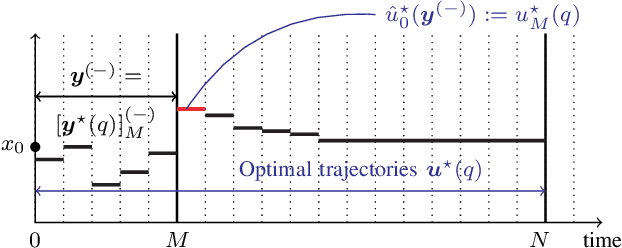
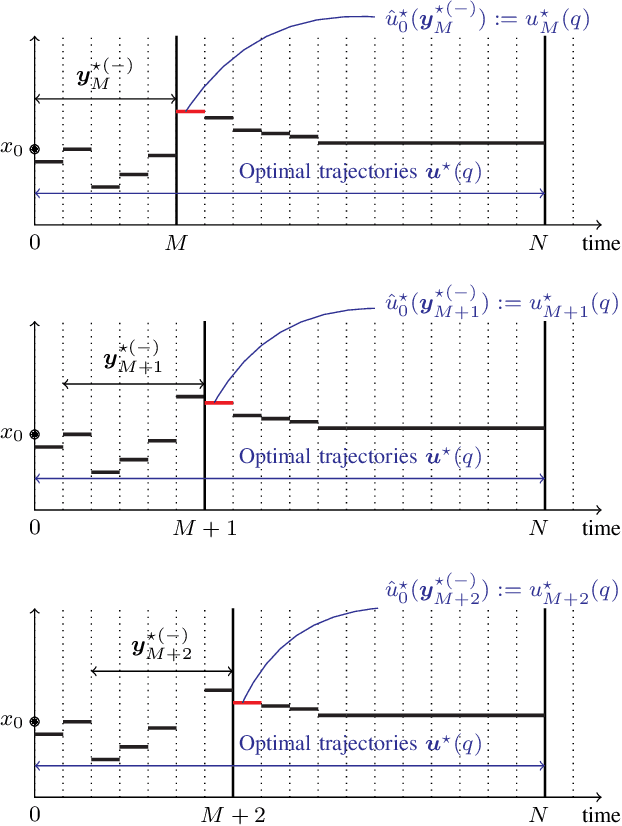
In this paper, a simple heuristic is proposed for the design of uncertainty aware predictive controllers for nonlinear models involving uncertain parameters. The method relies on Machine Learning-based approximation of ideal deterministic MPC solutions with perfectly known parameters. An efficient construction of the learning data set from these off-line solutions is proposed in which each solution provides many samples in the learning data. This enables a drastic reduction of the required number of Non Linear Programming problems to be solved off-line while explicitly exploiting the statistics of the parameters dispersion. The learning data is then used to design a fast on-line output dynamic feedback that explicitly incorporate information of the statistics of the parameters dispersion. An example is provided to illustrate the efficiency and the relevance of the proposed framework. It is in particular shown that the proposed solution recovers up to 78\% of the expected advantage of having a perfect knowledge of the parameters compared to nominal design.
On the use of Data-Driven Cost Function Identification in Parametrized NMPC
May 08, 2020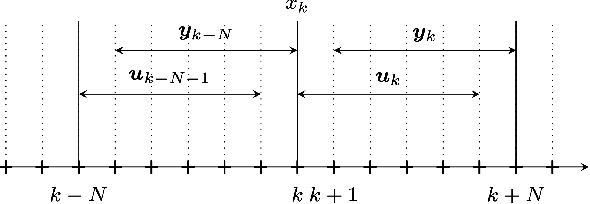
In this paper, a framework with complete numerical investigation is proposed regarding the feasibility of constrained Nonlinear Model Predictive Control (NMPC) design using Data-Driven model of the cost function. Although the idea is very much in the air, this paper proposes a complete implementation using python modules that are made freely available on a GitHub repository. Moreover, a discussion regarding the different ways of deriving control via data-driven modeling is proposed that can be of interest to practitioners.