 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTEM: Semantic Target Search and Exploration using MAVs in Cluttered Environments
May 30, 2026Autonomous target search is crucial for deploying Micro Aerial Vehicles (MAVs) in emergency response and rescue missions. Existing approaches either focus on 2D semantic navigation in structured environments -- which is less effective in complex 3D settings, or on robotic exploration in cluttered spaces -- which often lacks the semantic reasoning needed for efficient target search. This paper overcomes these limitations by proposing a novel framework that utilizes a semantically-guided viewpoint planner to minimize target search and exploration time in unstructured 3D environments using an MAV. Specifically, we develop a combinatorial planner that generates efficient semantic exploration plans by prioritizing viewpoints that likely lead to the target. To guide the planner towards the target, an active perception pipeline is developed that propagates semantic priorities of observed objects into neighboring frontier voxels for computing semantic information gains of frontier viewpoints. In addition, we demonstrate how LLM-based similarity scores can be leveraged as semantic priority input to our pipeline. Evaluations in two distinct simulation environments show that the proposed method consistently outperforms baselines by quickly finding the target while maintaining reasonable exploration times. Real-world experiments with an MAV further demonstrate the method's ability to handle practical constraints like limited battery life, small sensor range, and semantic uncertainty.
Learning Semantic Priorities for Autonomous Target Search
Mar 31, 2026The use of semantic features can improve the efficiency of target search in unknown environments for robotic search and rescue missions. Current target search methods rely on training with large datasets of similar domains, which limits the adaptability to diverse environments. However, human experts possess high-level knowledge about semantic relationships necessary to effectively guide a robot during target search missions in diverse and previously unseen environments. In this paper, we propose a target search method that leverages expert input to train a model of semantic priorities. By employing the learned priorities in a frontier exploration planner using combinatorial optimization, our approach achieves efficient target search driven by semantic features while ensuring robustness and complete coverage. The proposed semantic priority model is trained with several synthetic datasets of simulated expert guidance for target search. Simulation tests in previously unseen environments show that our method consistently achieves faster target recovery than a coverage-driven exploration planner.
Where to Look Next: Learning Viewpoint Recommendations for Informative Trajectory Planning
Mar 04, 2022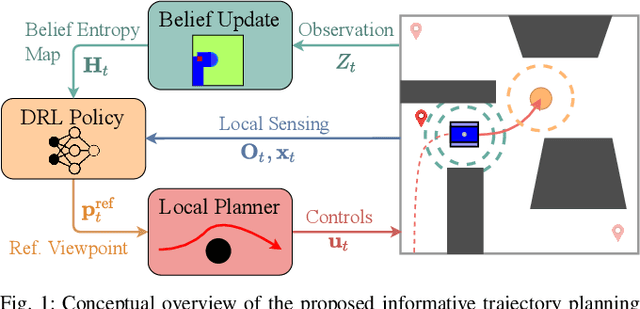
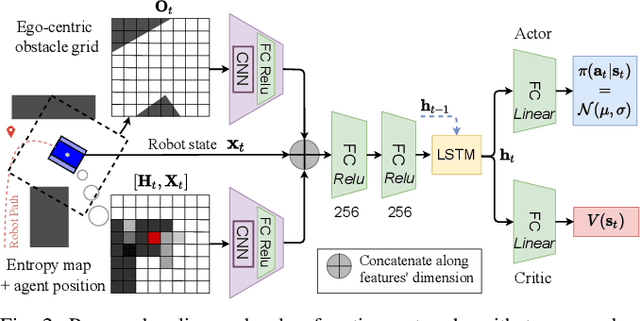
Search missions require motion planning and navigation methods for information gathering that continuously replan based on new observations of the robot's surroundings. Current methods for information gathering, such as Monte Carlo Tree Search, are capable of reasoning over long horizons, but they are computationally expensive. An alternative for fast online execution is to train, offline, an information gathering policy, which indirectly reasons about the information value of new observations. However, these policies lack safety guarantees and do not account for the robot dynamics. To overcome these limitations we train an information-aware policy via deep reinforcement learning, that guides a receding-horizon trajectory optimization planner. In particular, the policy continuously recommends a reference viewpoint to the local planner, such that the resulting dynamically feasible and collision-free trajectories lead to observations that maximize the information gain and reduce the uncertainty about the environment. In simulation tests in previously unseen environments, our method consistently outperforms greedy next-best-view policies and achieves competitive performance compared to Monte Carlo Tree Search, in terms of information gains and coverage time, with a reduction in execution time by three orders of magnitude.