 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmoothing Policies and Safe Policy Gradients
May 08, 2019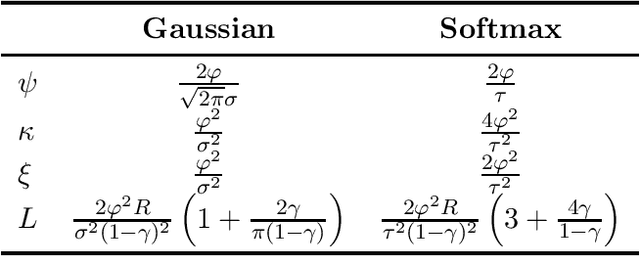
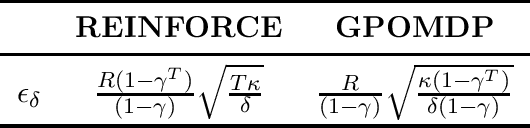
Policy gradient algorithms are among the best candidates for the much anticipated application of reinforcement learning to real-world control tasks, such as the ones arising in robotics. However, the trial-and-error nature of these methods introduces safety issues whenever the learning phase itself must be performed on a physical system. In this paper, we address a specific safety formulation, where danger is encoded in the reward signal and the learning agent is constrained to never worsen its performance. By studying actor-only policy gradient from a stochastic optimization perspective, we establish improvement guarantees for a wide class of parametric policies, generalizing existing results on Gaussian policies. This, together with novel upper bounds on the variance of policy gradient estimators, allows to identify those meta-parameter schedules that guarantee monotonic improvement with high probability. The two key meta-parameters are the step size of the parameter updates and the batch size of the gradient estimators. By a joint, adaptive selection of these meta-parameters, we obtain a safe policy gradient algorithm.
Exploration Bonus for Regret Minimization in Undiscounted Discrete and Continuous Markov Decision Processes
Dec 11, 2018We introduce and analyse two algorithms for exploration-exploitation in discrete and continuous Markov Decision Processes (MDPs) based on exploration bonuses. SCAL$^+$ is a variant of SCAL (Fruit et al., 2018) that performs efficient exploration-exploitation in any unknown weakly-communicating MDP for which an upper bound C on the span of the optimal bias function is known. For an MDP with $S$ states, $A$ actions and $\Gamma \leq S$ possible next states, we prove that SCAL$^+$ achieves the same theoretical guarantees as SCAL (i.e., a high probability regret bound of $\widetilde{O}(C\sqrt{\Gamma SAT})$), with a much smaller computational complexity. Similarly, C-SCAL$^+$ exploits an exploration bonus to achieve sublinear regret in any undiscounted MDP with continuous state space. We show that C-SCAL$^+$ achieves the same regret bound as UCCRL (Ortner and Ryabko, 2012) while being the first implementable algorithm with regret guarantees in this setting. While optimistic algorithms such as UCRL, SCAL or UCCRL maintain a high-confidence set of plausible MDPs around the true unknown MDP, SCAL$^+$ and C-SCAL$^+$ leverage on an exploration bonus to directly plan on the empirically estimated MDP, thus being more computationally efficient.
Efficient Bias-Span-Constrained Exploration-Exploitation in Reinforcement Learning
Jul 06, 2018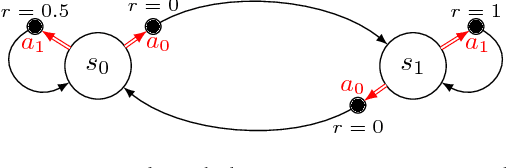
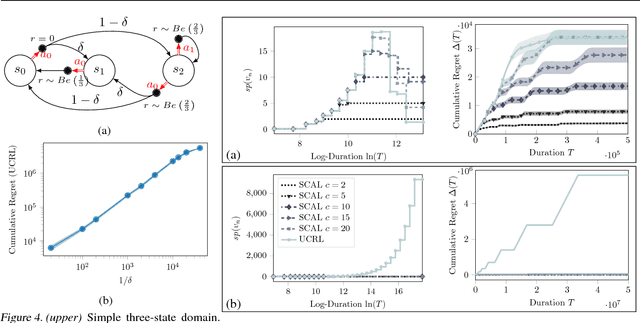
We introduce SCAL, an algorithm designed to perform efficient exploration-exploitation in any unknown weakly-communicating Markov decision process (MDP) for which an upper bound $c$ on the span of the optimal bias function is known. For an MDP with $S$ states, $A$ actions and $\Gamma \leq S$ possible next states, we prove a regret bound of $\widetilde{O}(c\sqrt{\Gamma SAT})$, which significantly improves over existing algorithms (e.g., UCRL and PSRL), whose regret scales linearly with the MDP diameter $D$. In fact, the optimal bias span is finite and often much smaller than $D$ (e.g., $D=\infty$ in non-communicating MDPs). A similar result was originally derived by Bartlett and Tewari (2009) for REGAL.C, for which no tractable algorithm is available. In this paper, we relax the optimization problem at the core of REGAL.C, we carefully analyze its properties, and we provide the first computationally efficient algorithm to solve it. Finally, we report numerical simulations supporting our theoretical findings and showing how SCAL significantly outperforms UCRL in MDPs with large diameter and small span.
Near Optimal Exploration-Exploitation in Non-Communicating Markov Decision Processes
Jul 06, 2018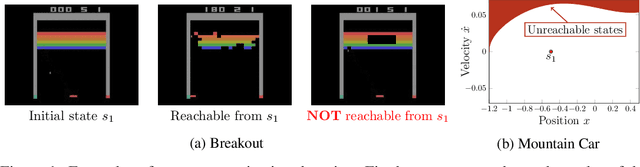
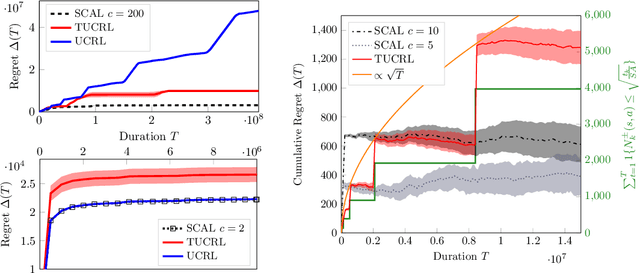
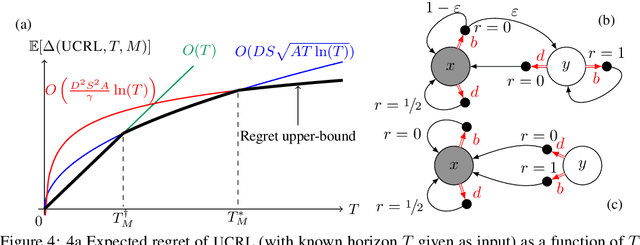
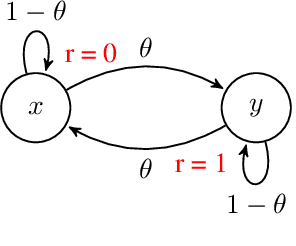
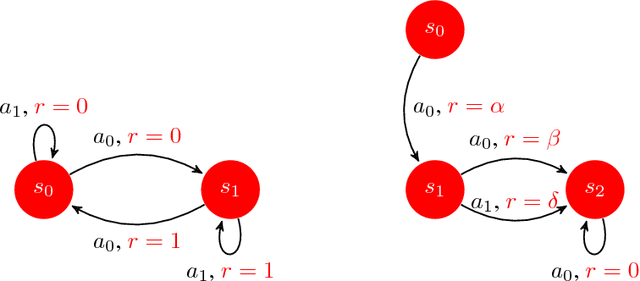
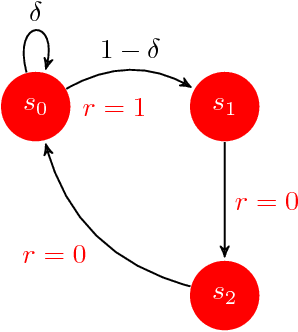
While designing the state space of an MDP, it is common to include states that are transient or not reachable by any policy (e.g., in mountain car, the product space of speed and position contains configurations that are not physically reachable). This leads to defining weakly-communicating or multi-chain MDPs. In this paper, we introduce \tucrl, the first algorithm able to perform efficient exploration-exploitation in any finite Markov Decision Process (MDP) without requiring any form of prior knowledge. In particular, for any MDP with $S^{\texttt{C}}$ communicating states, $A$ actions and $\Gamma^{\texttt{C}} \leq S^{\texttt{C}}$ possible communicating next states, we derive a $\widetilde{O}(D^{\texttt{C}} \sqrt{\Gamma^{\texttt{C}} S^{\texttt{C}} AT})$ regret bound, where $D^{\texttt{C}}$ is the diameter (i.e., the longest shortest path) of the communicating part of the MDP. This is in contrast with optimistic algorithms (e.g., UCRL, Optimistic PSRL) that suffer linear regret in weakly-communicating MDPs, as well as posterior sampling or regularised algorithms (e.g., REGAL), which require prior knowledge on the bias span of the optimal policy to bias the exploration to achieve sub-linear regret. We also prove that in weakly-communicating MDPs, no algorithm can ever achieve a logarithmic growth of the regret without first suffering a linear regret for a number of steps that is exponential in the parameters of the MDP. Finally, we report numerical simulations supporting our theoretical findings and showing how TUCRL overcomes the limitations of the state-of-the-art.
Stochastic Variance-Reduced Policy Gradient
Jun 14, 2018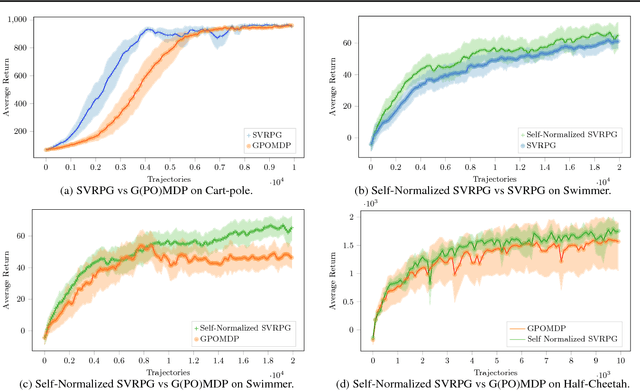
In this paper, we propose a novel reinforcement- learning algorithm consisting in a stochastic variance-reduced version of policy gradient for solving Markov Decision Processes (MDPs). Stochastic variance-reduced gradient (SVRG) methods have proven to be very successful in supervised learning. However, their adaptation to policy gradient is not straightforward and needs to account for I) a non-concave objective func- tion; II) approximations in the full gradient com- putation; and III) a non-stationary sampling pro- cess. The result is SVRPG, a stochastic variance- reduced policy gradient algorithm that leverages on importance weights to preserve the unbiased- ness of the gradient estimate. Under standard as- sumptions on the MDP, we provide convergence guarantees for SVRPG with a convergence rate that is linear under increasing batch sizes. Finally, we suggest practical variants of SVRPG, and we empirically evaluate them on continuous MDPs.
Importance Weighted Transfer of Samples in Reinforcement Learning
May 28, 2018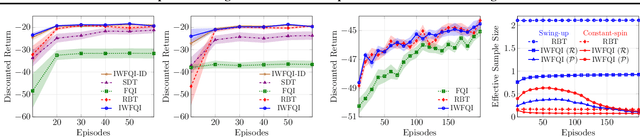
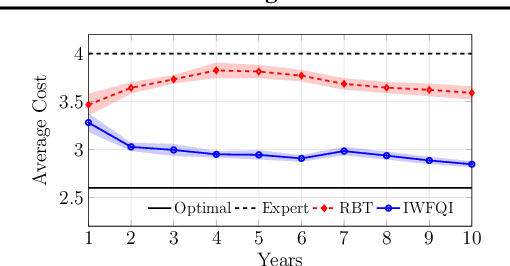

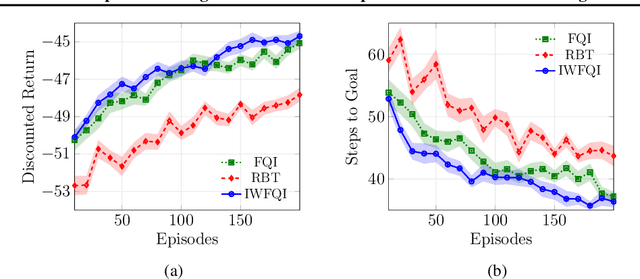
We consider the transfer of experience samples (i.e., tuples < s, a, s', r >) in reinforcement learning (RL), collected from a set of source tasks to improve the learning process in a given target task. Most of the related approaches focus on selecting the most relevant source samples for solving the target task, but then all the transferred samples are used without considering anymore the discrepancies between the task models. In this paper, we propose a model-based technique that automatically estimates the relevance (importance weight) of each source sample for solving the target task. In the proposed approach, all the samples are transferred and used by a batch RL algorithm to solve the target task, but their contribution to the learning process is proportional to their importance weight. By extending the results for importance weighting provided in supervised learning literature, we develop a finite-sample analysis of the proposed batch RL algorithm. Furthermore, we empirically compare the proposed algorithm to state-of-the-art approaches, showing that it achieves better learning performance and is very robust to negative transfer, even when some source tasks are significantly different from the target task.
Cost-Sensitive Approach to Batch Size Adaptation for Gradient Descent
Dec 09, 2017
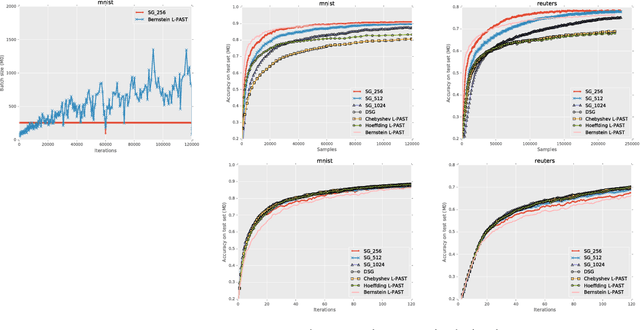
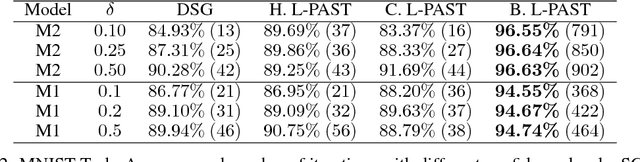
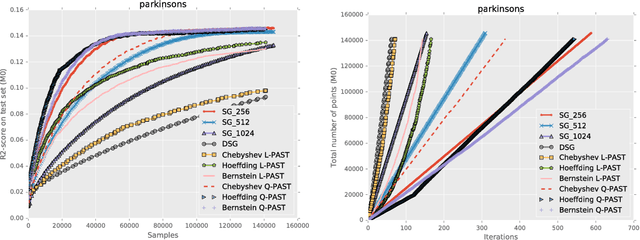
In this paper, we propose a novel approach to automatically determine the batch size in stochastic gradient descent methods. The choice of the batch size induces a trade-off between the accuracy of the gradient estimate and the cost in terms of samples of each update. We propose to determine the batch size by optimizing the ratio between a lower bound to a linear or quadratic Taylor approximation of the expected improvement and the number of samples used to estimate the gradient. The performance of the proposed approach is empirically compared with related methods on popular classification tasks. The work was presented at the NIPS workshop on Optimizing the Optimizers. Barcelona, Spain, 2016.
Multi-objective Reinforcement Learning with Continuous Pareto Frontier Approximation Supplementary Material
Nov 18, 2014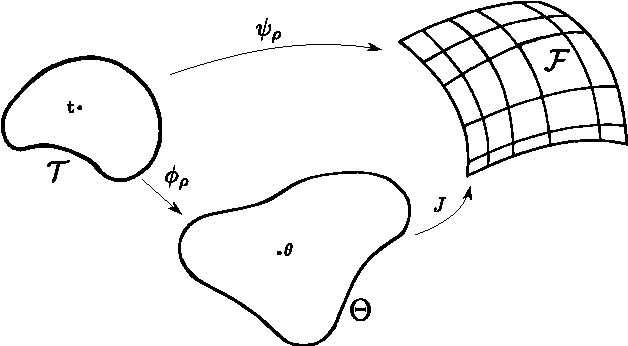
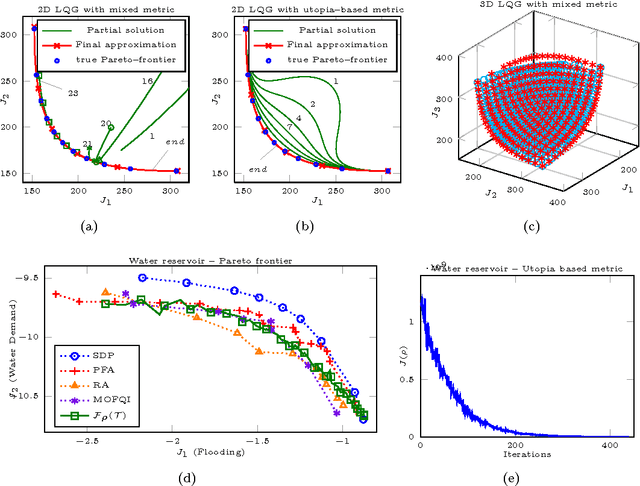
This document contains supplementary material for the paper "Multi-objective Reinforcement Learning with Continuous Pareto Frontier Approximation", published at the Twenty-Ninth AAAI Conference on Artificial Intelligence (AAAI-15). The paper is about learning a continuous approximation of the Pareto frontier in Multi-Objective Markov Decision Problems (MOMDPs). We propose a policy-based approach that exploits gradient information to generate solutions close to the Pareto ones. Differently from previous policy-gradient multi-objective algorithms, where n optimization routines are use to have n solutions, our approach performs a single gradient-ascent run that at each step generates an improved continuous approximation of the Pareto frontier. The idea is to exploit a gradient-based approach to optimize the parameters of a function that defines a manifold in the policy parameter space so that the corresponding image in the objective space gets as close as possible to the Pareto frontier. Besides deriving how to compute and estimate such gradient, we will also discuss the non-trivial issue of defining a metric to assess the quality of the candidate Pareto frontiers. Finally, the properties of the proposed approach are empirically evaluated on two interesting MOMDPs.