 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunicating Through Avatars in Industry 5.0: A Focus Group Study on Human-Robot Collaboration
Jun 10, 2025The integration of collaborative robots (cobots) in industrial settings raises concerns about worker well-being, particularly due to reduced social interactions. Avatars - designed to facilitate worker interactions and engagement - are promising solutions to enhance the human-robot collaboration (HRC) experience. However, real-world perspectives on avatar-supported HRC remain unexplored. To address this gap, we conducted a focus group study with employees from a German manufacturing company that uses cobots. Before the discussion, participants engaged with a scripted, industry-like HRC demo in a lab setting. This qualitative approach provided valuable insights into the avatar's potential roles, improvements to its behavior, and practical considerations for deploying them in industrial workcells. Our findings also emphasize the importance of personalized communication and task assistance. Although our study's limitations restrict its generalizability, it serves as an initial step in recognizing the potential of adaptive, context-aware avatar interactions in real-world industrial environments.
Socially Interactive Agents for Robotic Neurorehabilitation Training: Conceptualization and Proof-of-concept Study
Jun 17, 2024



Individuals with diverse motor abilities often benefit from intensive and specialized rehabilitation therapies aimed at enhancing their functional recovery. Nevertheless, the challenge lies in the restricted availability of neurorehabilitation professionals, hindering the effective delivery of the necessary level of care. Robotic devices hold great potential in reducing the dependence on medical personnel during therapy but, at the same time, they generally lack the crucial human interaction and motivation that traditional in-person sessions provide. To bridge this gap, we introduce an AI-based system aimed at delivering personalized, out-of-hospital assistance during neurorehabilitation training. This system includes a rehabilitation training device, affective signal classification models, training exercises, and a socially interactive agent as the user interface. With the assistance of a professional, the envisioned system is designed to be tailored to accommodate the unique rehabilitation requirements of an individual patient. Conceptually, after a preliminary setup and instruction phase, the patient is equipped to continue their rehabilitation regimen autonomously in the comfort of their home, facilitated by a socially interactive agent functioning as a virtual coaching assistant. Our approach involves the integration of an interactive socially-aware virtual agent into a neurorehabilitation robotic framework, with the primary objective of recreating the social aspects inherent to in-person rehabilitation sessions. We also conducted a feasibility study to test the framework with healthy patients. The results of our preliminary investigation indicate that participants demonstrated a propensity to adapt to the system. Notably, the presence of the interactive agent during the proposed exercises did not act as a source of distraction; instead, it positively impacted users' engagement.
Exploring the Dynamics between Cobot's Production Rhythm, Locus of Control and Emotional State in a Collaborative Assembly Scenario
Feb 01, 2024In industrial scenarios, there is widespread use of collaborative robots (cobots), and growing interest is directed at evaluating and measuring the impact of some characteristics of the cobot on the human factor. In the present pilot study, the effect that the production rhythm (C1 - Slow, C2 - Fast, C3 - Adapted to the participant's pace) of a cobot has on the Experiential Locus of Control (ELoC) and the emotional state of 31 participants has been examined. The operators' performance, the degree of basic internal Locus of Control, and the attitude towards the robots were also considered. No difference was found regarding the emotional state and the ELoC in the three conditions, but considering the other psychological variables, a more complex situation emerges. Overall, results seem to indicate a need to consider the person's psychological characteristics to offer a differentiated and optimal interaction experience.
Gaze Detection and Analysis for Initiating Joint Activity in Industrial Human-Robot Collaboration
Dec 12, 2023



Collaborative robots (cobots) are widely used in industrial applications, yet extensive research is still needed to enhance human-robot collaborations and operator experience. A potential approach to improve the collaboration experience involves adapting cobot behavior based on natural cues from the operator. Inspired by the literature on human-human interactions, we conducted a wizard-of-oz study to examine whether a gaze towards the cobot can serve as a trigger for initiating joint activities in collaborative sessions. In this study, 37 participants engaged in an assembly task while their gaze behavior was analyzed. We employ a gaze-based attention recognition model to identify when the participants look at the cobot. Our results indicate that in most cases (84.88\%), the joint activity is preceded by a gaze towards the cobot. Furthermore, during the entire assembly cycle, the participants tend to look at the cobot around the time of the joint activity. To the best of our knowledge, this is the first study to analyze the natural gaze behavior of participants working on a joint activity with a robot during a collaborative assembly task.
Design of a multimodal device to improve well-being of autistic workers interacting with collaborative robots
Apr 27, 2023Several studies report that people diagnosed with autism spectrum disorder (ASD) have low employment rates and major difficulties in maintaining occupation (Hendricks, 2010). Adopting smart and interactive technology, promoted by Industry 4.0, can be a valid solution to improve social inclusion in the workplace. The present work describes the design and development process of the multimodal device (A)MICO (acronym for 'A Multimodal device to improve inclusive Interaction between Cobot and Operator'), aimed to improve the user experience of ASD workers interacting with collaborative robots (cobots) in production lines. (A)MICO proposes a new intuitive mode of communication in which information about the cobot activity is transferred through acoustic and visual feedback. Lights and sounds are designed to make the user aware of the cobot's activity and gain control of the situation. To define the optimal feedback configuration, a co-design process has been performed involving five users with high functioning autism (HFA). The inclusion of users with HFA in the design process allows to analyse the system from different perspectives and increase the acceptance of the final product (Francis et al., 2009). In addition, (A)MICO is designed to be integrated into a pre-existing cobot system and its feedback can be customized making job tasks more human-friendly and accessible to all. To achieve this purpose, Design for All principles were taken into consideration since the preliminary stages of the study, in order to develop a device that could represent a valuable aid in improving the well-being and productivity for both neurotypical and neurodiverse users.
Gaze-based Attention Recognition for Human-Robot Collaboration
Mar 30, 2023Attention (and distraction) recognition is a key factor in improving human-robot collaboration. We present an assembly scenario where a human operator and a cobot collaborate equally to piece together a gearbox. The setup provides multiple opportunities for the cobot to adapt its behavior depending on the operator's attention, which can improve the collaboration experience and reduce psychological strain. As a first step, we recognize the areas in the workspace that the human operator is paying attention to, and consequently, detect when the operator is distracted. We propose a novel deep-learning approach to develop an attention recognition model. First, we train a convolutional neural network to estimate the gaze direction using a publicly available image dataset. Then, we use transfer learning with a small dataset to map the gaze direction onto pre-defined areas of interest. Models trained using this approach performed very well in leave-one-subject-out evaluation on the small dataset. We performed an additional validation of our models using the video snippets collected from participants working as an operator in the presented assembly scenario. Although the recall for the Distracted class was lower in this case, the models performed well in recognizing the areas the operator paid attention to. To the best of our knowledge, this is the first work that validated an attention recognition model using data from a setting that mimics industrial human-robot collaboration. Our findings highlight the need for validation of attention recognition solutions in such full-fledged, non-guided scenarios.
Experience in Engineering Complex Systems: Active Preference Learning with Multiple Outcomes and Certainty Levels
Feb 27, 2023


Black-box optimization refers to the optimization problem whose objective function and/or constraint sets are either unknown, inaccessible, or non-existent. In many applications, especially with the involvement of humans, the only way to access the optimization problem is through performing physical experiments with the available outcomes being the preference of one candidate with respect to one or many others. Accordingly, the algorithm so-called Active Preference Learning has been developed to exploit this specific information in constructing a surrogate function based on standard radial basis functions, and then forming an easy-to-solve acquisition function which repetitively suggests new decision vectors to search for the optimal solution. Based on this idea, our approach aims to extend the algorithm in such a way that can exploit further information effectively, which can be obtained in reality such as: 5-point Likert type scale for the outcomes of the preference query (i.e., the preference can be described in not only "this is better than that" but also "this is much better than that" level), or multiple outcomes for a single preference query with possible additive information on how certain the outcomes are. The validation of the proposed algorithm is done through some standard benchmark functions, showing a promising improvement with respect to the state-of-the-art algorithm.
Towards social embodied cobots: The integration of an industrial cobot with a social virtual agent
Jan 16, 2023



The integration of the physical capabilities of an industrial collaborative robot with a social virtual character may represent a viable solution to enhance the workers' perception of the system as an embodied social entity and increase social engagement and well-being at the workplace. An online study was setup using prerecorded video interactions in order to pilot potential advantages of different embodied configurations of the cobot-avatar system in terms of perceptions of Social Presence, cobot-avatar Unity and Social Role of the system, and explore the relation of these. In particular, two different configurations were explored and compared: the virtual character was displayed either on a tablet strapped onto the base of the cobot or on a large TV screen positioned at the back of the workcell. The results imply that participants showed no clear preference based on the constructs, and both configurations fulfill these basic criteria. In terms of the relations between the constructs, there were strong correlations between perception of Social Presence, Unity and Social Role (Collegiality). This gives a valuable insight into the role of these constructs in the perception of cobots as embodied social entities, and towards building cobots that support well-being at the workplace.
Employing Socially Interactive Agents for Robotic Neurorehabilitation Training
Jun 03, 2022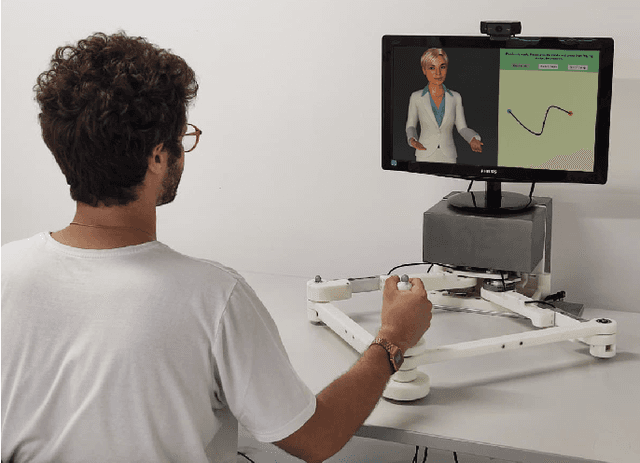
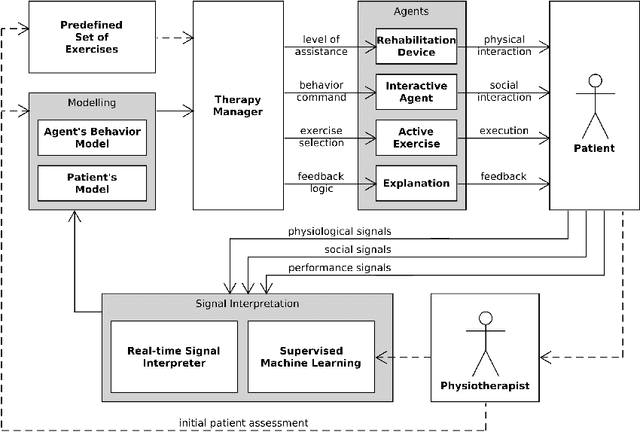
In today's world, many patients with cognitive impairments and motor dysfunction seek the attention of experts to perform specific conventional therapies to improve their situation. However, due to a lack of neurorehabilitation professionals, patients suffer from severe effects that worsen their condition. In this paper, we present a technological approach for a novel robotic neurorehabilitation training system. It relies on a combination of a rehabilitation device, signal classification methods, supervised machine learning models for training adaptation, training exercises, and socially interactive agents as a user interface. Together with a professional, the system can be trained towards the patient's specific needs. Furthermore, after a training phase, patients are enabled to train independently at home without the assistance of a physical therapist with a socially interactive agent in the role of a coaching assistant.