 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Neural Networks by Modelling Semi-Active Shock Absorber
Jul 19, 2022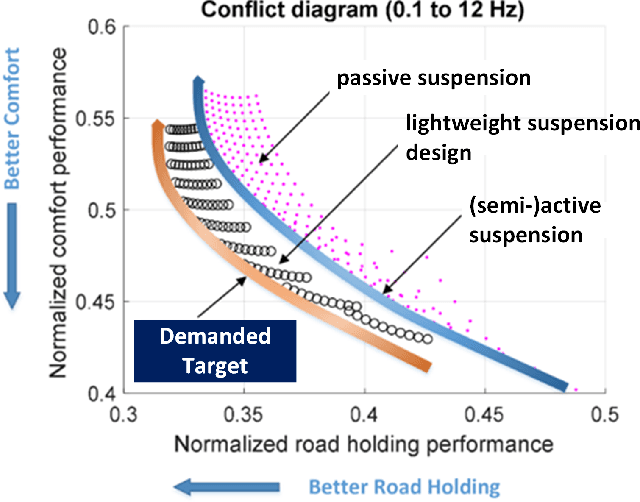
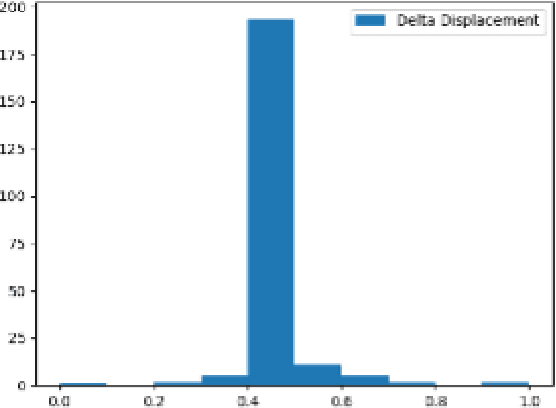
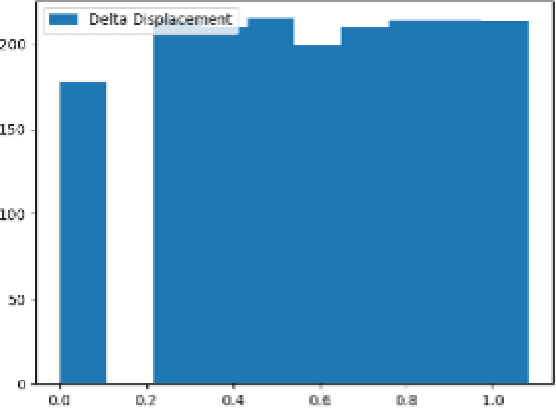
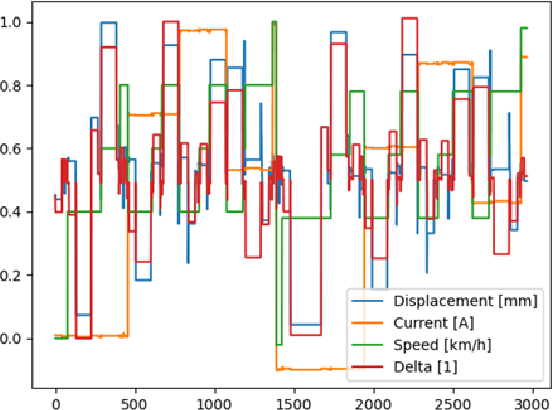
A permanently increasing number of on-board automotive control systems requires new approaches to their digital mapping that improves functionality in terms of adaptability and robustness as well as enables their easier on-line software update. As it can be concluded from many recent studies, various methods applying neural networks (NN) can be good candidates for relevant digital twin (DT) tools in automotive control system design, for example, for controller parameterization and condition monitoring. However, the NN-based DT has strong requirements to an adequate amount of data to be used in training and design. In this regard, the paper presents an approach, which demonstrates how the regression tasks can be efficiently handled by the modeling of a semi-active shock absorber within the DT framework. The approach is based on the adaptation of time series augmentation techniques to the stationary data that increases the variance of the latter. Such a solution gives a background to elaborate further data engineering methods for the data preparation of sophisticated databases.
Boosting Mask R-CNN Performance for Long, Thin Forensic Traces with Pre-Segmentation and IoU Region Merging
Mar 08, 2022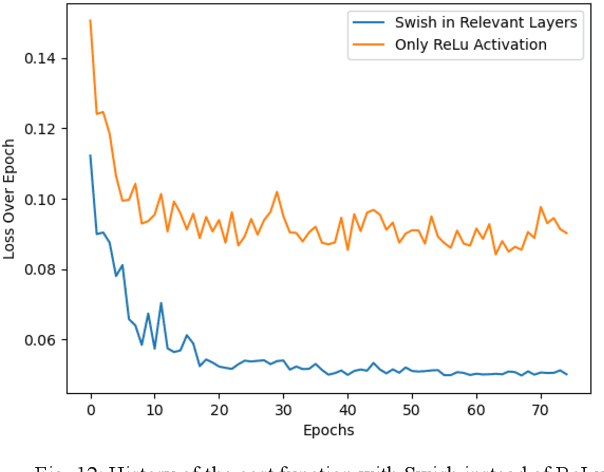
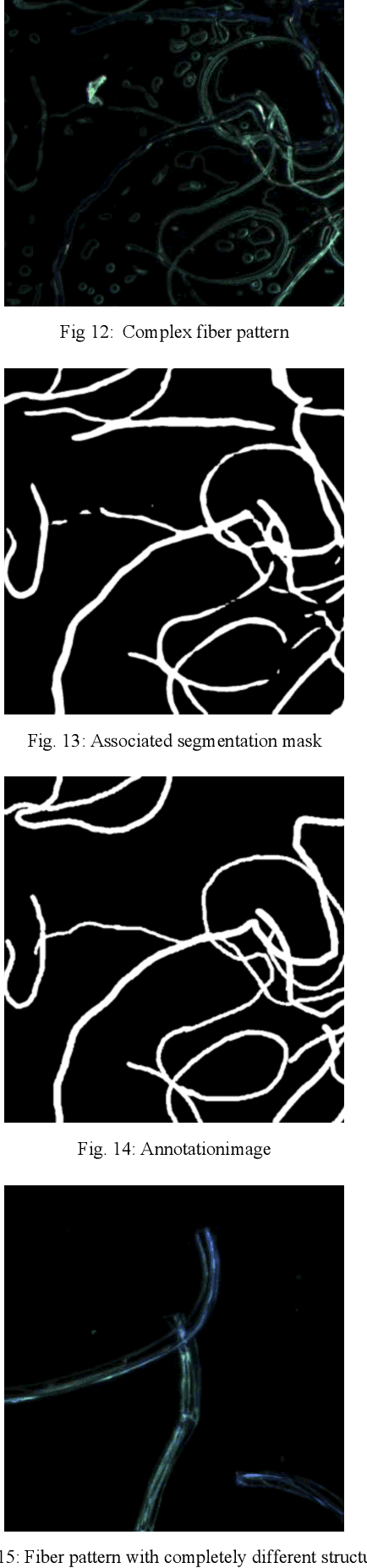
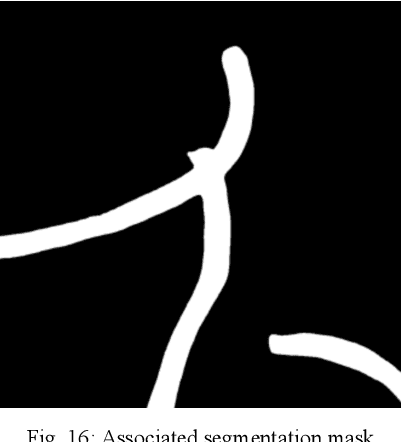

Mask R-CNN has recently achieved great success in the field of instance segmentation. However, weaknesses of the algorithm have been repeatedly pointed out as well, especially in the segmentation of long, sparse objects whose orientation is not exclusively horizontal or vertical. We present here an approach that significantly improves the performance of the algorithm by first pre-segmenting the images with a PSPNet algorithm. To further improve its prediction, we have developed our own cost functions and heuristics in the form of training strategies, which can prevent so-called (early) overfitting and achieve a more targeted convergence. Furthermore, due to the high variance of the images, especially for PSPNet, we aimed to develop strategies for a high robustness and generalization, which are also presented here.