 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Dictionary-Free Method for Identifying Linear Model of Nonlinear System with Input Delay
Nov 06, 2025Nonlinear dynamical systems with input delays pose significant challenges for prediction, estimation, and control due to their inherent complexity and the impact of delays on system behavior. Traditional linear control techniques often fail in these contexts, necessitating innovative approaches. This paper introduces a novel approach to approximate the Koopman operator using an LSTM-enhanced Deep Koopman model, enabling linear representations of nonlinear systems with time delays. By incorporating Long Short-Term Memory (LSTM) layers, the proposed framework captures historical dependencies and efficiently encodes time-delayed system dynamics into a latent space. Unlike traditional extended Dynamic Mode Decomposition (eDMD) approaches that rely on predefined dictionaries, the LSTM-enhanced Deep Koopman model is dictionary-free, which mitigates the problems with the underlying dynamics being known and incorporated into the dictionary. Quantitative comparisons with extended eDMD on a simulated system demonstrate highly significant performance gains in prediction accuracy in cases where the true nonlinear dynamics are unknown and achieve comparable results to eDMD with known dynamics of a system.
Deep Koopman Economic Model Predictive Control of a Pasteurisation Unit
Nov 06, 2025This paper presents a deep Koopman-based Economic Model Predictive Control (EMPC) for efficient operation of a laboratory-scale pasteurization unit (PU). The method uses Koopman operator theory to transform the complex, nonlinear system dynamics into a linear representation, enabling the application of convex optimization while representing the complex PU accurately. The deep Koopman model utilizes neural networks to learn the linear dynamics from experimental data, achieving a 45% improvement in open-loop prediction accuracy over conventional N4SID subspace identification. Both analyzed models were employed in the EMPC formulation that includes interpretable economic costs, such as energy consumption, material losses due to inadequate pasteurization, and actuator wear. The feasibility of EMPC is ensured using slack variables. The deep Koopman EMPC and N4SID EMPC are numerically validated on a nonlinear model of multivariable PU under external disturbance. The disturbances include feed pump fail-to-close scenario and the introduction of a cold batch to be pastuerized. These results demonstrate that the deep Koopmand EMPC achieves a 32% reduction in total economic cost compared to the N4SID baseline. This improvement is mainly due to the reductions in material losses and energy consumption. Furthermore, the steady-state operation via Koopman-based EMPC requires 10.2% less electrical energy. The results highlight the practical advantages of integrating deep Koopman representations with economic optimization to achieve resource-efficient control of thermal-intensive plants.
Neural Network Based Explicit MPC for Chemical Reactor Control
Dec 10, 2019
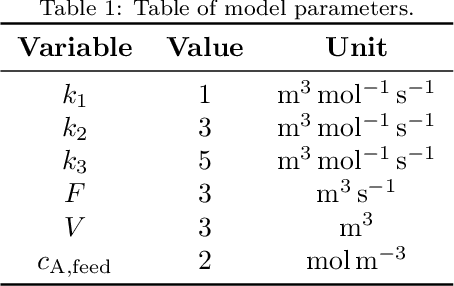
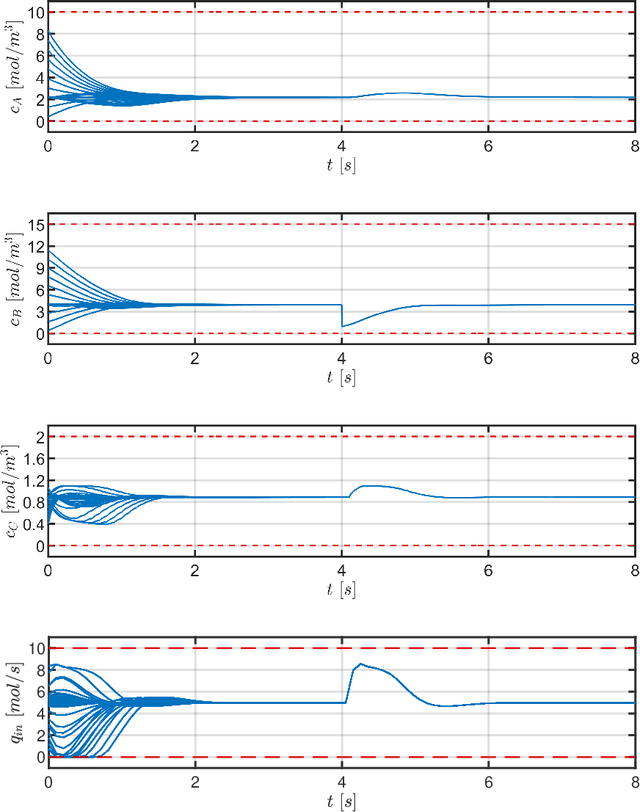
In this paper, we show the implementation of deep neural networks applied in process control. In our approach, we based the training of the neural network on model predictive control. Model predictive control is popular for its ability to be tuned by the weighting matrices and by the fact that it respects the constraints. We present the neural network that can approximate the behavior of the MPC in the way of mimicking the control input trajectory while the constraints on states and control input remain unimpaired of the value of the weighting matrices. This approach is demonstrated in a simulation case study involving a continuous stirred tank reactor, where multi-component chemical reaction takes place.