 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3DTV: A Feedforward Interpolation Network for Real-Time View Synthesis
Apr 13, 2026Real-time free-viewpoint rendering requires balancing multi-camera redundancy with the latency constraints of interactive applications. We address this challenge by combining lightweight geometry with learning and propose 3DTV, a feedforward network for real-time sparse-view interpolation. A Delaunay-based triplet selection ensures angular coverage for each target view. Building on this, we introduce a pose-aware depth module that estimates a coarse-to-fine depth pyramid, enabling efficient feature reprojection and occlusion-aware blending. Unlike methods that require scene-specific optimization, 3DTV runs feedforward without retraining, making it practical for AR/VR, telepresence, and interactive applications. Our experiments on challenging multi-view video datasets demonstrate that 3DTV consistently achieves a strong balance of quality and efficiency, outperforming recent real-time novel-view baselines. Crucially, 3DTV avoids explicit proxies, enabling robust rendering across diverse scenes. This makes it a practical solution for low-latency multi-view streaming and interactive rendering. Project Page: https://stefanmschulz.github.io/3DTV_webpage/
Transformer-Based Inpainting for Real-Time 3D Streaming in Sparse Multi-Camera Setups
Mar 05, 2026High-quality 3D streaming from multiple cameras is crucial for immersive experiences in many AR/VR applications. The limited number of views - often due to real-time constraints - leads to missing information and incomplete surfaces in the rendered images. Existing approaches typically rely on simple heuristics for the hole filling, which can result in inconsistencies or visual artifacts. We propose to complete the missing textures using a novel, application-targeted inpainting method independent of the underlying representation as an image-based post-processing step after the novel view rendering. The method is designed as a standalone module compatible with any calibrated multi-camera system. For this we introduce a multi-view aware, transformer-based network architecture using spatio-temporal embeddings to ensure consistency across frames while preserving fine details. Additionally, our resolution-independent design allows adaptation to different camera setups, while an adaptive patch selection strategy balances inference speed and quality, allowing real-time performance. We evaluate our approach against state-of-the-art inpainting techniques under the same real-time constraints and demonstrate that our model achieves the best trade-off between quality and speed, outperforming competitors in both image and video-based metrics.
Neu-PiG: Neural Preconditioned Grids for Fast Dynamic Surface Reconstruction on Long Sequences
Feb 25, 2026Temporally consistent surface reconstruction of dynamic 3D objects from unstructured point cloud data remains challenging, especially for very long sequences. Existing methods either optimize deformations incrementally, risking drift and requiring long runtimes, or rely on complex learned models that demand category-specific training. We present Neu-PiG, a fast deformation optimization method based on a novel preconditioned latent-grid encoding that distributes spatial features parameterized on the position and normal direction of a keyframe surface. Our method encodes entire deformations across all time steps at various spatial scales into a multi-resolution latent grid, parameterized by the position and normal direction of a reference surface from a single keyframe. This latent representation is then augmented for time modulation and decoded into per-frame 6-DoF deformations via a lightweight multilayer perceptron (MLP). To achieve high-fidelity, drift-free surface reconstructions in seconds, we employ Sobolev preconditioning during gradient-based training of the latent space, completely avoiding the need for any explicit correspondences or further priors. Experiments across diverse human and animal datasets demonstrate that Neu-PiG outperforms state-the-art approaches, offering both superior accuracy and scalability to long sequences while running at least 60x faster than existing training-free methods and achieving inference speeds on the same order as heavy pretrained models.
Capture Stage Environments: A Guide to Better Matting
Jul 10, 2025



Capture stages are high-end sources of state-of-the-art recordings for downstream applications in movies, games, and other media. One crucial step in almost all pipelines is the matting of images to isolate the captured performances from the background. While common matting algorithms deliver remarkable performance in other applications like teleconferencing and mobile entertainment, we found that they struggle significantly with the peculiarities of capture stage content. The goal of our work is to share insights into those challenges as a curated list of those characteristics along with a constructive discussion for proactive intervention and present a guideline to practitioners for an improved workflow to mitigate unresolved challenges. To this end, we also demonstrate an efficient pipeline to adapt state-of-the-art approaches to such custom setups without the need of extensive annotations, both offline and real-time. For an objective evaluation, we propose a validation methodology based on a leading diffusion model that highlights the benefits of our approach.
VHS: High-Resolution Iterative Stereo Matching with Visual Hull Priors
Jun 04, 2024We present a stereo-matching method for depth estimation from high-resolution images using visual hulls as priors, and a memory-efficient technique for the correlation computation. Our method uses object masks extracted from supplementary views of the scene to guide the disparity estimation, effectively reducing the search space for matches. This approach is specifically tailored to stereo rigs in volumetric capture systems, where an accurate depth plays a key role in the downstream reconstruction task. To enable training and regression at high resolutions targeted by recent systems, our approach extends a sparse correlation computation into a hybrid sparse-dense scheme suitable for application in leading recurrent network architectures. We evaluate the performance-efficiency trade-off of our method compared to state-of-the-art methods, and demonstrate the efficacy of the visual hull guidance. In addition, we propose a training scheme for a further reduction of memory requirements during optimization, facilitating training on high-resolution data.
Occlusion Fields: An Implicit Representation for Non-Line-of-Sight Surface Reconstruction
Mar 22, 2022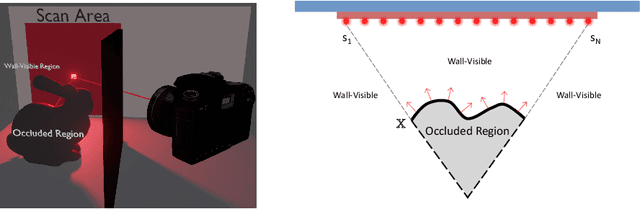
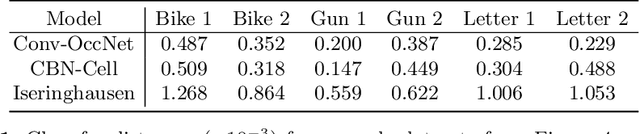
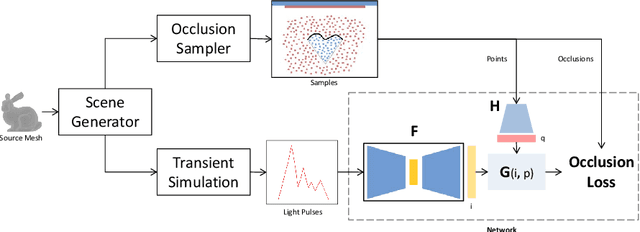
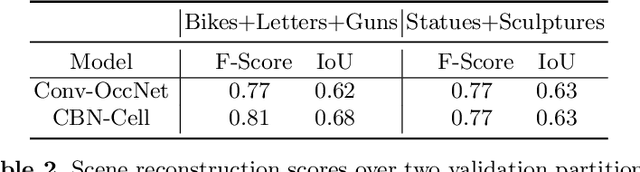
Non-line-of-sight reconstruction (NLoS) is a novel indirect imaging modality that aims to recover objects or scene parts outside the field of view from measurements of light that is indirectly scattered off a directly visible, diffuse wall. Despite recent advances in acquisition and reconstruction techniques, the well-posedness of the problem at large, and the recoverability of objects and their shapes in particular, remains an open question. The commonly employed Fermat path criterion is rather conservative with this regard, as it classifies some surfaces as unrecoverable, although they contribute to the signal. In this paper, we use a simpler necessary criterion for an opaque surface patch to be recoverable. Such piece of surface must be directly visible from some point on the wall, and it must occlude the space behind itself. Inspired by recent advances in neural implicit representations, we devise a new representation and reconstruction technique for NLoS scenes that unifies the treatment of recoverability with the reconstruction itself. Our approach, which we validate on various synthetic and experimental datasets, exhibits interesting properties. Unlike memory-inefficient volumetric representations, ours allows to infer adaptively tessellated surfaces from time-of-flight measurements of moderate resolution. It can further recover features beyond the Fermat path criterion, and it is robust to significant amounts of self-occlusion. We believe that this is the first time that these properties have been achieved in one system that, as an additional benefit, is trainable and hence suited for data-driven approaches.
Residuum-Condition Diagram and Reduction of Over-Complete Endmember-Sets
Sep 26, 2018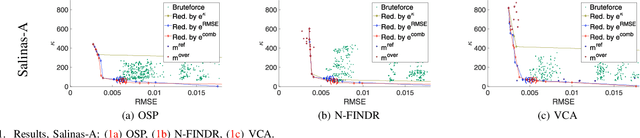
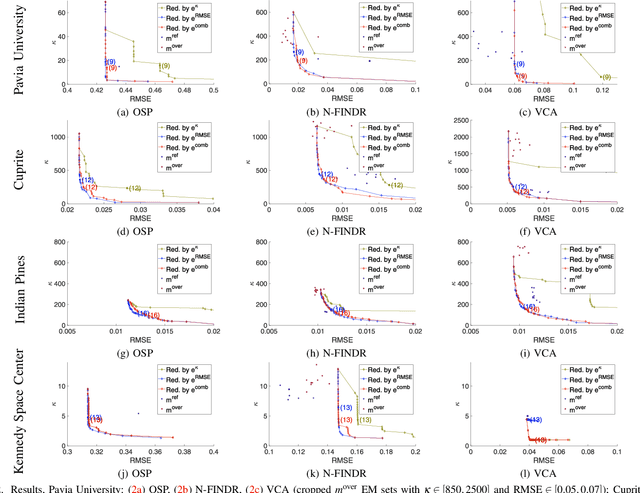
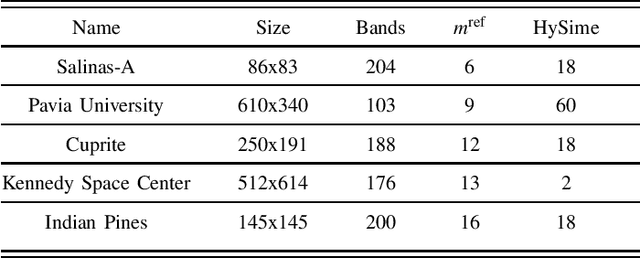
Extracting reference spectra, or endmembers (EMs) from a given multi- or hyperspectral image, as well as estimating the size of the EM set, plays an important role in multispectral image processing. In this paper, we present condition-residuum-diagrams. By plotting the residuum resulting from the unmixing and reconstruction and the condition number of various EM sets, the resulting diagram provides insight into the behavior of the spectral unmixing under a varying amount of endmembers (EMs). Furthermore, we utilize condition-residuum-diagrams to realize an EM reduction algorithm that starts with an initially extracted, over-complete EM set. An over-complete EM set commonly exhibits a good unmixing result, i.e. a lower reconstruction residuum, but due to its partial redundancy, the unmixing gets numerically unstable, i.e. the unmixed abundances values are less reliable. Our greedy reduction scheme improves the EM set by reducing the condition number, i.e. enhancing the set's stability, while keeping the reconstruction error as low as possible. The resulting set sequence gives hint to the optimal EM set and its size. We demonstrate the benefit of our condition-residuum-diagram and reduction scheme on well-studied datasets with known reference EM set sizes for several well-known EE algorithms.