 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFixation Sequences as Time Series: A Topological Approach to Dyslexia Detection
Apr 23, 2026Persistent homology, a method from topological data analysis, extracts robust, multi-scale features from data. It produces stable representations of time series by applying varying thresholds to their values (a process known as a \textit{filtration}). We develop novel filtrations for time series and introduce topological methods for the analysis of eye-tracking data, by interpreting fixation sequences as time series, and constructing ``hybrid models'' that combine topological features with traditional statistical features. We empirically evaluate our method by applying it to the task of dyslexia detection from eye-tracking-while-reading data using the Copenhagen Corpus, which contains scanpaths from dyslexic and non-dyslexic L1 and L2 readers. Our hybrid models outperform existing approaches that rely solely on traditional features, showing that persistent homology captures complementary information encoded in fixation sequences. The strength of these topological features is further underscored by their achieving performance comparable to established baseline methods. Importantly, our proposed filtrations outperform existing ones.
AuToMATo: A Parameter-Free Persistence-Based Clustering Algorithm
Aug 13, 2024



We present AuToMATo, a novel parameter-free clustering algorithm based on persistent homology. AuToMATo combines the existing ToMATo clustering algorithm with a bootstrapping procedure in order to separate significant peaks of an estimated density function from non-significant ones. We perform a thorough comparison of AuToMATo against many other state-of-the-art clustering algorithms. We find that not only that AuToMATo compares favorably against other parameter-free clustering algorithms, but in many instances also significantly outperforms even the best selection of parameters for other algorithms. AuToMATo is motivated by applications in topological data analysis, in particular the Mapper algorithm, where it is desirable to work with a parameter-free clustering algorithm. Indeed, we provide evidence that AuToMATo performs well when used with Mapper. Finally, we provide an open-source implementation of AuToMATo in Python that is fully compatible with the standardscikit-learn architecture.
Cubic Range Error Model for Stereo Vision with Illuminators
Mar 11, 2018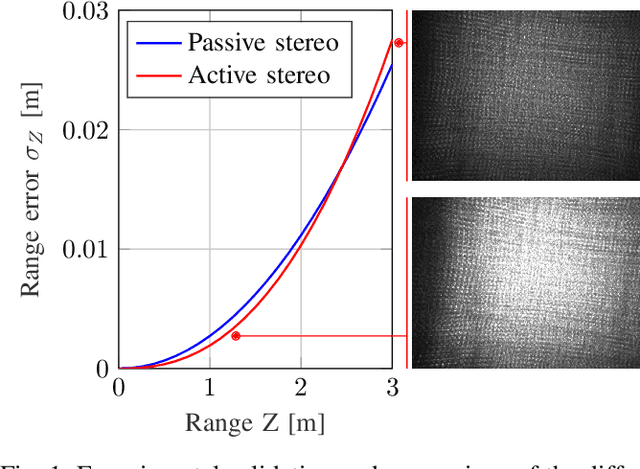
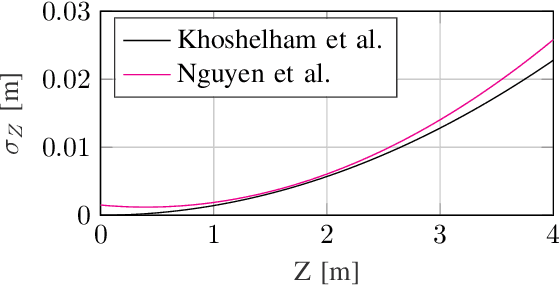
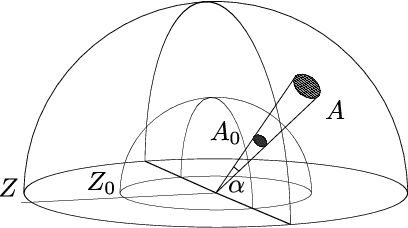
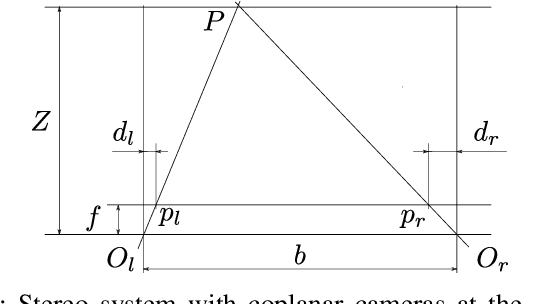
Use of low-cost depth sensors, such as a stereo camera setup with illuminators, is of particular interest for numerous applications ranging from robotics and transportation to mixed and augmented reality. The ability to quantify noise is crucial for these applications, e.g., when the sensor is used for map generation or to develop a sensor scheduling policy in a multi-sensor setup. Range error models provide uncertainty estimates and help weigh the data correctly in instances where range measurements are taken from different vantage points or with different sensors. The weighing is important to fuse range data into a map in a meaningful way, i.e., the high confidence data is relied on most heavily. Such a model is derived in this work. We show that the range error for stereo systems with integrated illuminators is cubic and validate the proposed model experimentally with an off-the-shelf structured light stereo system. The experiments confirm the validity of the model and simplify the application of this type of sensor in robotics. The proposed error model is relevant to any stereo system with low ambient light where the main light source is located at the camera system. Among others, this is the case for structured light stereo systems and night stereo systems with headlights. In this work, we propose that the range error is cubic in range for stereo systems with integrated illuminators. Experimental validation with an off-the-shelf structured light stereo system shows that the exponent is between 2.4 and 2.6. The deviation is attributed to our model considering only shot noise.