 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaximizing Energy Battery Efficiency in Swarm Robotics
Jun 05, 2019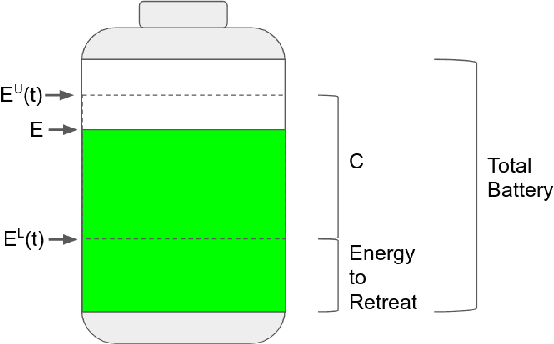

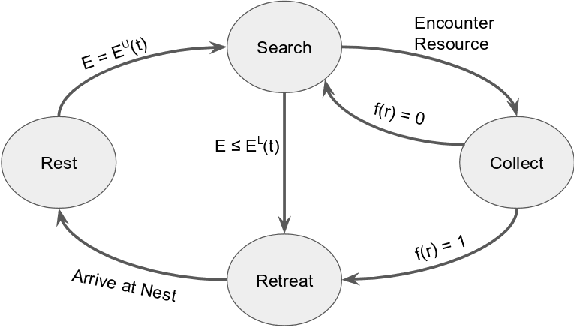
Miniaturization and cost, two of the main attractive factors of swarm robotics, have motivated its use as a solution in object collecting tasks, search & rescue missions, and other applications. However, in the current literature only a few papers consider energy allocation efficiency within a swarm. Generally, robots recharge to their maximum level every time unconditionally, and do not incorporate estimates of the energy needed for their next task. In this paper we present an energy efficiency maximization method that minimizes the overall energy cost within a swarm while simultaneously maximizing swarm performance on an object gathering task. The method utilizes dynamic thresholds for upper and lower battery limits. This method has also shown to improve the efficiency of existing energy management methods.
Socially Inspired Communication in Swarm Robotics
Jun 03, 2019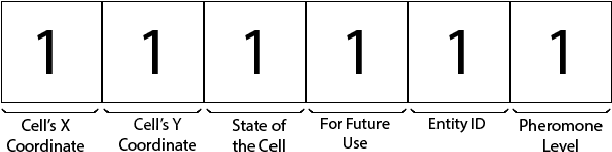
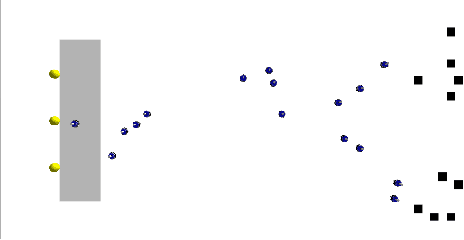
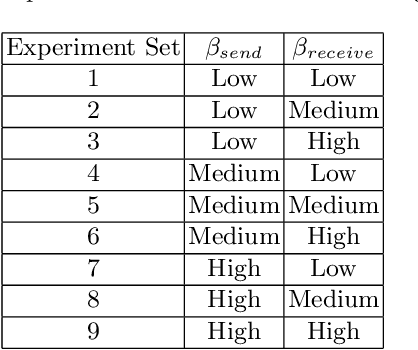
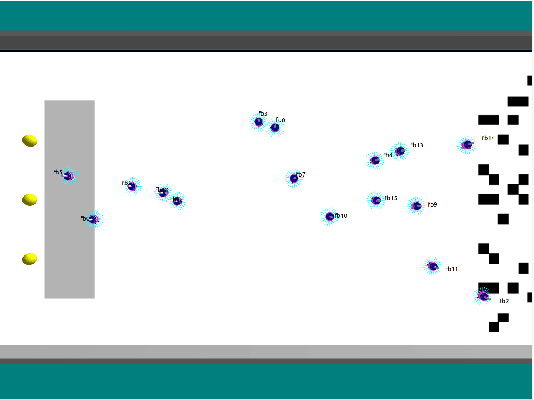
Localized communication in swarms has been shown to increase swarm effectiveness in some situations by allowing for additional opportunities for cooperation. However, communication and utilization of potentially outdated information is also a concern. We present an explicit non-directional goal-based communication model and message accept/reject scheme, and test our model in a set of object gathering experiments with a swarm of robots. The results of the experiments indicate that even low levels of communication regarding the swarm's goal outperform high levels of random information communication.
Evaluating Older Users' Experiences with Commercial Dialogue Systems: Implications for Future Design and Development
Jan 30, 2019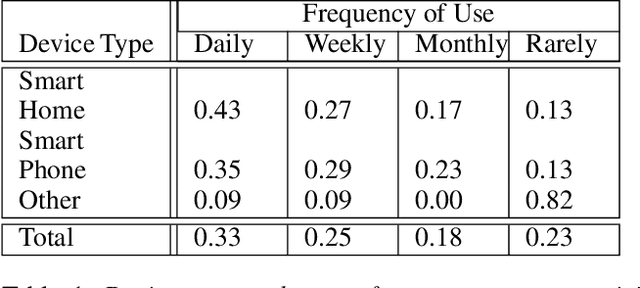
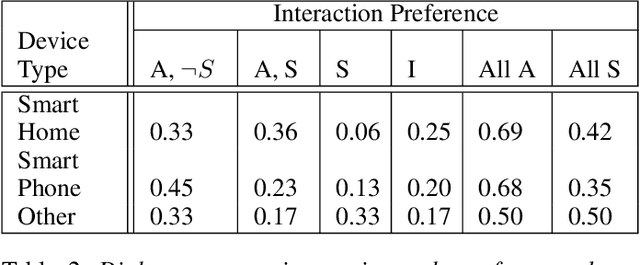
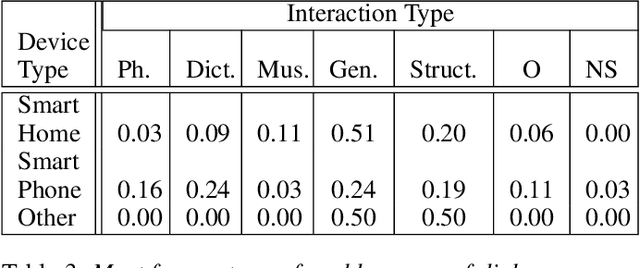
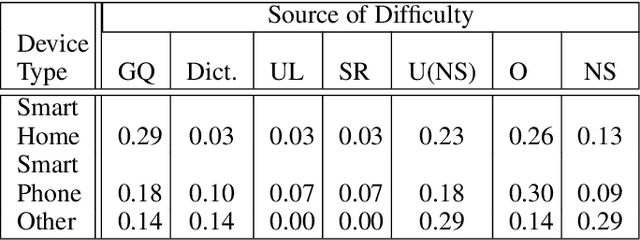
Understanding the needs of a variety of distinct user groups is vital in designing effective, desirable dialogue systems that will be adopted by the largest possible segment of the population. Despite the increasing popularity of dialogue systems in both mobile and home formats, user studies remain relatively infrequent and often sample a segment of the user population that is not representative of the needs of the potential user population as a whole. This is especially the case for users who may be more reluctant adopters, such as older adults. In this paper we discuss the results of a recent user study performed over a large population of age 50 and over adults in the Midwestern United States that have experience using a variety of commercial dialogue systems. We show the common preferences, use cases, and feature gaps identified by older adult users in interacting with these systems. Based on these results, we propose a new, robust user modeling framework that addresses common issues facing older adult users, which can then be generalized to the wider user population.
ALAN: Adaptive Learning for Multi-Agent Navigation
Oct 11, 2017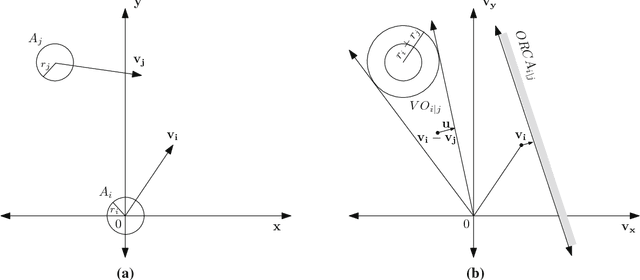
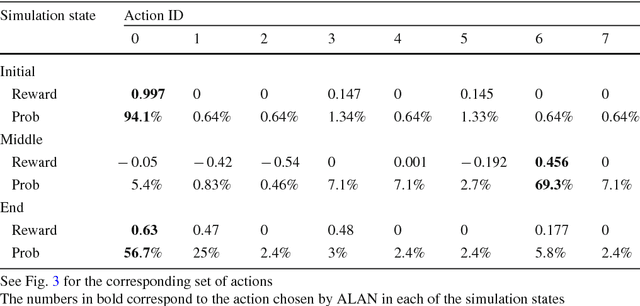
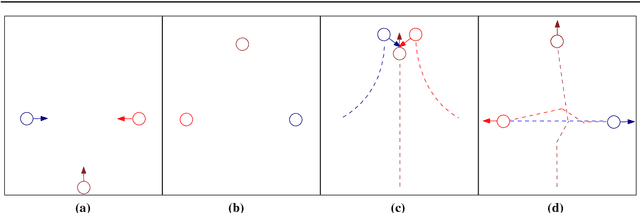
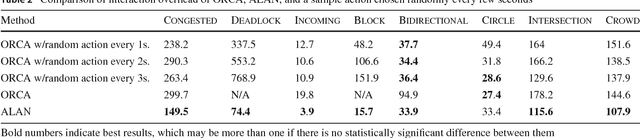
In multi-agent navigation, agents need to move towards their goal locations while avoiding collisions with other agents and static obstacles, often without communication with each other. Existing methods compute motions that are optimal locally but do not account for the aggregated motions of all agents, producing inefficient global behavior especially when agents move in a crowded space. In this work, we develop methods to allow agents to dynamically adapt their behavior to their local conditions. We accomplish this by formulating the multi-agent navigation problem as an action-selection problem, and propose an approach, ALAN, that allows agents to compute time-efficient and collision-free motions. ALAN is highly scalable because each agent makes its own decisions on how to move using a set of velocities optimized for a variety of navigation tasks. Experimental results show that the agents using ALAN, in general, reach their destinations faster than using ORCA, a state-of-the-art collision avoidance framework, the Social Forces model for pedestrian navigation, and a Predictive collision avoidance model.