 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGotta Grow Fast: Design and Benchmarking of a Tip Mount for High-Speed Vine Robots
Jun 04, 2026Soft, growing vine robots extend through tip eversion, a mechanism that enables navigation through cluttered environments. However, integrating cameras and other sensors at the tip is uniquely challenging because the material forming the tip is constantly renewed as the robot grows. This continual material turnover, combined with friction between internal layers, added tip weight, and fabric constriction, complicates sensor and tool mounting. These limitations hinder the deployment of vine robots for inspection and search tasks, where rapid growth while carrying tip-mounted sensors is essential. In this work, we present a triangular roller tip mount that reduces internal resistance during growth by rolling rather than sliding against the robot body. The design was refined through iterative failure analysis, enabling, for the first time, consistent eversion on a TPU-coated ripstop nylon vine robot. To quantitatively evaluate mount performance, we introduce a custom testbed that isolates tip mounting effects by measuring tail tension during eversion. Comparative experiments across multiple mount variants, including prior designs, show that our triangular roller mount achieves the lowest tail tension and most repeatable growth performance. These results establish both a validated tip mount design and a repeatable benchmarking framework for advancing sensor and tool integration in soft growing robots. CAD for the mount and testbed is available at: https://sprout-mitll.github.io/tip_mounts/.
Fabric Pneumatic Artificial Muscle-Based Head-Neck Exosuit: Design, Modeling, and Evaluation
Mar 13, 2026Wearable exosuits assist human movement in tasks ranging from rehabilitation to daily activities; specifically, head-neck support is necessary for patients with certain neurological disorders. Rigid-link exoskeletons have shown to enable head-neck mobility compared to static braces, but their bulkiness and restrictive structure inspire designs using "soft" actuation methods. In this paper, we propose a fabric pneumatic artificial muscle-based exosuit design for head-neck support. We describe the design of our prototype and physics-based model, enabling us to derive actuator pressures required to compensate for gravitational load. Our modeled range of motion and workspace analysis indicate that the limited actuator lengths impose slight limitations (83% workspace coverage), and gravity compensation imposes a more significant limitation (43% workspace coverage). We introduce compression force along the neck as a novel, potentially comfort-related metric. We further apply our model to compare the torque output of various actuator placement configurations, allowing us to select a design with stability in lateral deviation and high axial rotation torques. The model correctly predicts trends in measured data where wrapping the actuators around the neck is not a significant factor. Our test dummy and human user demonstration confirm that the exosuit can provide functional head support and trajectory tracking, underscoring the potential of artificial muscle-based soft actuation for head-neck mobility assistance.
* Manuscript (8 pages, 5 tables, 7 figures) accepted to IEEE International Conference on Robotics and Automation 2026. Video attachment: https://youtu.be/iGuEbvCXgJ0?si=WqP2q-P_Mp1Brmfc
Evaluating Accuracy of Vine Robot Shape Sensing with Distributed Inertial Measurement Units
Feb 27, 2026Soft, tip-extending vine robots are well suited for navigating tight, debris-filled environments, making them ideal for urban search and rescue. Sensing the full shape of a vine robot's body is helpful both for localizing information from other sensors placed along the robot body and for determining the robot's configuration within the space being explored. Prior approaches have localized vine robot tips using a single inertial measurement unit (IMU) combined with force sensing or length estimation, while one method demonstrated full-body shape sensing using distributed IMUs on a passively steered robot in controlled maze environments. However, the accuracy of distributed IMU-based shape sensing under active steering, varying robot lengths, and different sensor spacings has not been systematically quantified. In this work, we experimentally evaluate the accuracy of vine robot shape sensing using distributed IMUs along the robot body. We quantify IMU drift, measuring an average orientation drift rate of 1.33 degrees/min across 15 sensors. For passive steering, mean tip position error was 11% of robot length. For active steering, mean tip position error increased to 16%. During growth experiments across lengths from 30-175 cm, mean tip error was 8%, with a positive trend with increasing length. We also analyze the influence of sensor spacing and observe that intermediate spacings can minimize error for single-curvature shapes. These results demonstrate the feasibility of distributed IMU-based shape sensing for vine robots while highlighting key limitations and opportunities for improved modeling and algorithmic integration for field deployment.
Modeling Collapse of Steered Vine Robots Under Their Own Weight
Oct 29, 2025Soft, vine-inspired growing robots that move by eversion are highly mobile in confined environments, but, when faced with gaps in the environment, they may collapse under their own weight while navigating a desired path. In this work, we present a comprehensive collapse model that can predict the collapse length of steered robots in any shape using true shape information and tail tension. We validate this model by collapsing several unsteered robots without true shape information. The model accurately predicts the trends of those experiments. We then attempt to collapse a robot steered with a single actuator at different orientations. Our models accurately predict collapse when it occurs. Finally, we demonstrate how this could be used in the field by having a robot attempt a gap-crossing task with and without inflating its actuators. The robot needs its actuators inflated to cross the gap without collapsing, which our model supports. Our model has been specifically tested on straight and series pouch motor-actuated robots made of non-stretchable material, but it could be applied to other robot variations. This work enables us to model the robot's collapse behavior in any open environment and understand the parameters it needs to succeed in 3D navigation tasks.
On Steerability Factors for Growing Vine Robots
Oct 26, 2025Vine robots extend their tubular bodies by everting material from the tip, enabling navigation in complex environments with a minimalist soft body. Despite their promise for field applications, especially in the urban search and rescue domain, performance is constrained by the weight of attached sensors or tools, as well as other design and control choices. This work investigates how tip load, pressure, length, diameter, and fabrication method shape vine robot steerability--the ability to maneuver with controlled curvature--for robots that steer with series pouch motor-style pneumatic actuators. We conduct two groups of experiments: (1) studying tip load, chamber pressure, length, and diameter in a robot supporting itself against gravity, and (2) studying fabrication method and ratio of actuator to chamber pressure in a robot supported on the ground. Results show that steerability decreases with increasing tip load, is best at moderate chamber pressure, increases with length, and is largely unaffected by diameter. Robots with actuators attached on their exterior begin curving at low pressure ratios, but curvature saturates at high pressure ratios; those with actuators integrated into the robot body require higher pressure ratios to begin curving but achieve higher curvature overall. We demonstrate that robots optimized with these principles outperform those with ad hoc parameters in a mobility task that involves maximizing upward and horizontal curvatures.
RubbleSim: A Photorealistic Structural Collapse Simulator for Confined Space Mapping
Oct 23, 2025
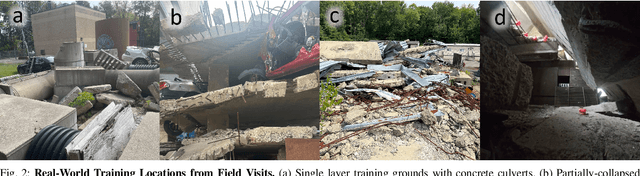


Despite well-reported instances of robots being used in disaster response, there is scant published data on the internal composition of the void spaces within structural collapse incidents. Data collected during these incidents is mired in legal constraints, as ownership is often tied to the responding agencies, with little hope of public release for research. While engineered rubble piles are used for training, these sites are also reluctant to release information about their proprietary training grounds. To overcome this access challenge, we present RubbleSim -- an open-source, reconfigurable simulator for photorealistic void space exploration. The design of the simulation assets is directly informed by visits to numerous training rubble sites at differing levels of complexity. The simulator is implemented in Unity with multi-operating system support. The simulation uses a physics-based approach to build stochastic rubble piles, allowing for rapid iteration between simulation worlds while retaining absolute knowledge of the ground truth. Using RubbleSim, we apply a state-of-the-art structure-from-motion algorithm to illustrate how perception performance degrades under challenging visual conditions inside the emulated void spaces. Pre-built binaries and source code to implement are available online: https://github.com/mit-ll/rubble_pile_simulator.