 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGotta Grow Fast: Design and Benchmarking of a Tip Mount for High-Speed Vine Robots
Jun 04, 2026Soft, growing vine robots extend through tip eversion, a mechanism that enables navigation through cluttered environments. However, integrating cameras and other sensors at the tip is uniquely challenging because the material forming the tip is constantly renewed as the robot grows. This continual material turnover, combined with friction between internal layers, added tip weight, and fabric constriction, complicates sensor and tool mounting. These limitations hinder the deployment of vine robots for inspection and search tasks, where rapid growth while carrying tip-mounted sensors is essential. In this work, we present a triangular roller tip mount that reduces internal resistance during growth by rolling rather than sliding against the robot body. The design was refined through iterative failure analysis, enabling, for the first time, consistent eversion on a TPU-coated ripstop nylon vine robot. To quantitatively evaluate mount performance, we introduce a custom testbed that isolates tip mounting effects by measuring tail tension during eversion. Comparative experiments across multiple mount variants, including prior designs, show that our triangular roller mount achieves the lowest tail tension and most repeatable growth performance. These results establish both a validated tip mount design and a repeatable benchmarking framework for advancing sensor and tool integration in soft growing robots. CAD for the mount and testbed is available at: https://sprout-mitll.github.io/tip_mounts/.
RubbleSim: A Photorealistic Structural Collapse Simulator for Confined Space Mapping
Oct 23, 2025
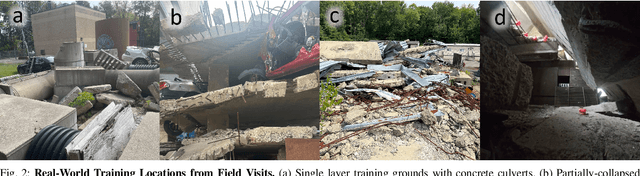


Despite well-reported instances of robots being used in disaster response, there is scant published data on the internal composition of the void spaces within structural collapse incidents. Data collected during these incidents is mired in legal constraints, as ownership is often tied to the responding agencies, with little hope of public release for research. While engineered rubble piles are used for training, these sites are also reluctant to release information about their proprietary training grounds. To overcome this access challenge, we present RubbleSim -- an open-source, reconfigurable simulator for photorealistic void space exploration. The design of the simulation assets is directly informed by visits to numerous training rubble sites at differing levels of complexity. The simulator is implemented in Unity with multi-operating system support. The simulation uses a physics-based approach to build stochastic rubble piles, allowing for rapid iteration between simulation worlds while retaining absolute knowledge of the ground truth. Using RubbleSim, we apply a state-of-the-art structure-from-motion algorithm to illustrate how perception performance degrades under challenging visual conditions inside the emulated void spaces. Pre-built binaries and source code to implement are available online: https://github.com/mit-ll/rubble_pile_simulator.
Field Insights for Portable Vine Robots in Urban Search and Rescue
Nov 10, 2024



Soft, growing vine robots are well-suited for exploring cluttered, unknown environments, and are theorized to be performant during structural collapse incidents caused by earthquakes, fires, explosions, and material flaws. These vine robots grow from the tip, enabling them to navigate rubble-filled passageways easily. State-of-the-art vine robots have been tested in archaeological and other field settings, but their translational capabilities to urban search and rescue (USAR) are not well understood. To this end, we present a set of experiments designed to test the limits of a vine robot system, the Soft Pathfinding Robotic Observation Unit (SPROUT), operating in an engineered collapsed structure. Our testing is driven by a taxonomy of difficulty derived from the challenges USAR crews face navigating void spaces and their associated hazards. Initial experiments explore the viability of the vine robot form factor, both ideal and implemented, as well as the control and sensorization of the system. A secondary set of experiments applies domain-specific design improvements to increase the portability and reliability of the system. SPROUT can grow through tight apertures, around corners, and into void spaces, but requires additional development in sensorization to improve control and situational awareness.