 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-Guided Dimension Reduction for Simulation-Free Operator Learning of Stiff Differential--Algebraic Systems
Apr 21, 2026Neural surrogates for stiff differential-algebraic equations (DAEs) face two key challenges: soft-constraint methods leave algebraic residuals that stiffness amplifies into large errors, while hard-constraint methods require trajectory data from computationally expensive stiff integrators. We introduce an extended Newton implicit layer that enforces algebraic consistency and quasi-steady-state reduction within a single differentiable solve. Given slow-state predictions from a physics-informed DeepONet, the proposed layer recovers fast and algebraic states, eliminates the stiffness-amplification pathway within each time window, and reduces the output dimension to the slow states alone. Gradients derived via the implicit function theorem capture a stiffness-scaled coupling term that is absent in penalty-based approaches. Cascaded implicit layers further extend the framework to multi-component systems with provable convergence. On a grid-forming inverter DAE (21 states), the proposed method (7 outputs, 1.42 percent error) significantly outperforms penalty methods (39.3 percent), standard Newton approaches (57.0 percent), and augmented Lagrangian or feedback linearization baselines, which fail to converge. Two independently trained models compose into a 44-state system without retraining, achieving 0.72 to 1.16 percent error with zero algebraic residual. Conformal prediction further provides 90 percent coverage in-distribution and enables automatic out-of-distribution detection.
Robust Dynamic Mode Decomposition
May 25, 2021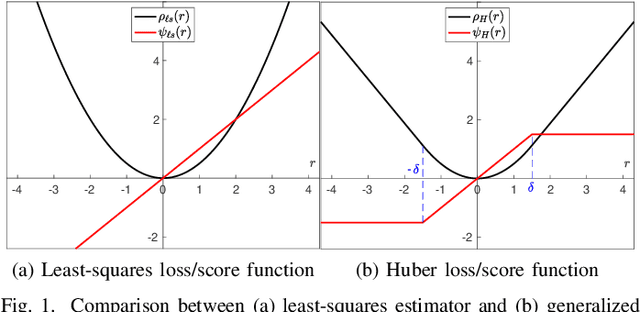
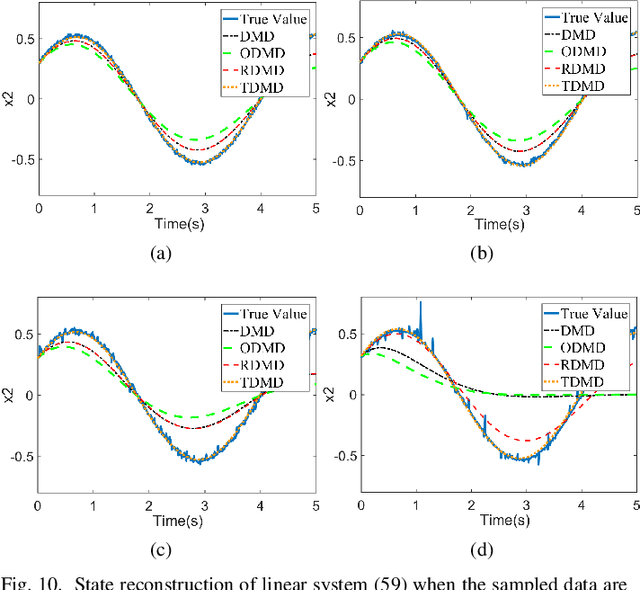
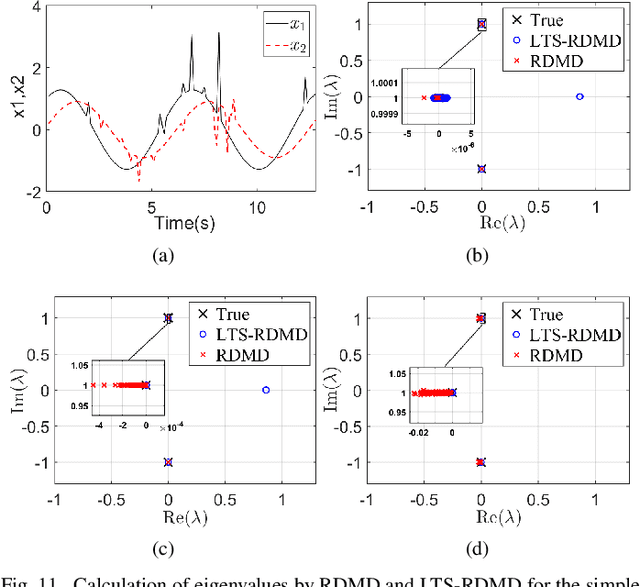
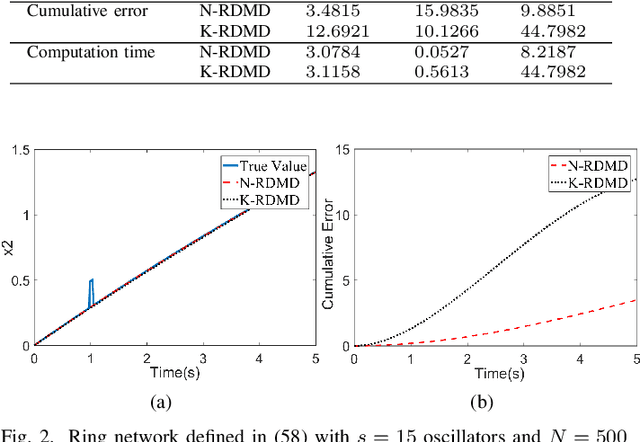
The paper develops a robust estimation method that makes the dynamic mode decomposition method resistant to outliers while being fast to compute and statistically efficient (i.e. accurate) at the Gaussian and non-Gaussian thick tailed distributions. The proposed robust dynamic mode decomposition (RDMD) is anchored on the theory of robust statistics. Specifically, it relies on the Schweppe-type Huber generalized maximum-likelihood estimator that minimizes a convex weighted Huber loss function, where the weights are calculated via projection statistics, thereby making the proposed RDMD robust to outliers, whether vertical outliers or bad leverage points. The performance of the proposed RDMD is demonstrated numerically using canonical models of dynamical systems. Simulation results reveal that it outperforms several other methods proposed in the literature.