 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgeh-approximation: History-Based Approximation of Possible World Semantics as ASP
Jun 14, 2013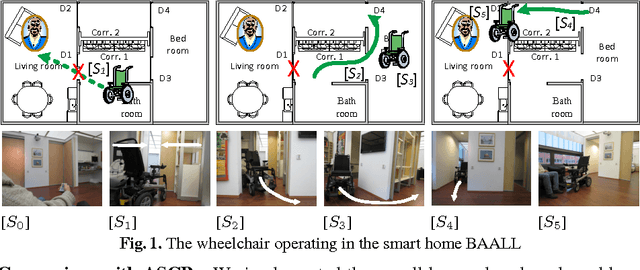
We propose an approximation of the Possible Worlds Semantics (PWS) for action planning. A corresponding planning system is implemented by a transformation of the action specification to an Answer-Set Program. A novelty is support for postdiction wrt. (a) the plan existence problem in our framework can be solved in NP, as compared to $\Sigma_2^P$ for non-approximated PWS of Baral(2000); and (b) the planner generates optimal plans wrt. a minimal number of actions in $\Delta_2^P$. We demo the planning system with standard problems, and illustrate its integration in a larger software framework for robot control in a smart home.
Narrative based Postdictive Reasoning for Cognitive Robotics
Jun 04, 2013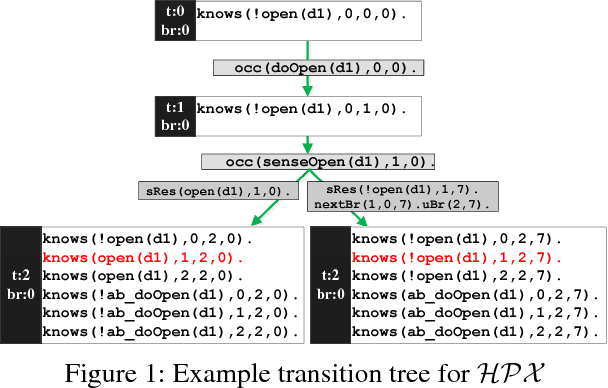
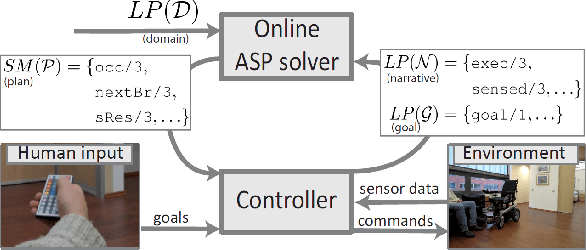
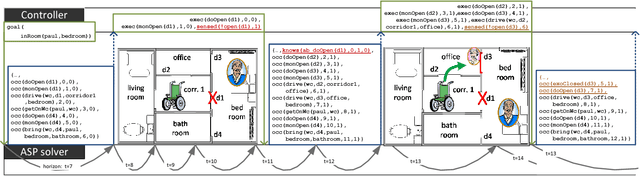
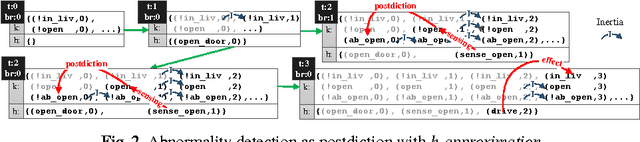
Making sense of incomplete and conflicting narrative knowledge in the presence of abnormalities, unobservable processes, and other real world considerations is a challenge and crucial requirement for cognitive robotics systems. An added challenge, even when suitably specialised action languages and reasoning systems exist, is practical integration and application within large-scale robot control frameworks. In the backdrop of an autonomous wheelchair robot control task, we report on application-driven work to realise postdiction triggered abnormality detection and re-planning for real-time robot control: (a) Narrative-based knowledge about the environment is obtained via a larger smart environment framework; and (b) abnormalities are postdicted from stable-models of an answer-set program corresponding to the robot's epistemic model. The overall reasoning is performed in the context of an approximate epistemic action theory based planner implemented via a translation to answer-set programming.