 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplementation and Evaluation of Networked Model Predictive Control System on Universal Robot
Jul 18, 2023Networked control systems are closed-loop feedback control systems containing system components that may be distributed geographically in different locations and interconnected via a communication network such as the Internet. The quality of network communication is a crucial factor that significantly affects the performance of remote control. This is due to the fact that network uncertainties can occur in the transmission of packets in the forward and backward channels of the system. The two most significant among these uncertainties are network time delay and packet loss. To overcome these challenges, the networked predictive control system has been proposed to provide improved performance and robustness using predictive controllers and compensation strategies. In particular, the model predictive control method is well-suited as an advanced approach compared to conventional methods. In this paper, a networked model predictive control system consisting of a model predictive control method and compensation strategies is implemented to control and stabilize a robot arm as a physical system. In particular, this work aims to analyze the performance of the system under the influence of network time delay and packet loss. Using appropriate performance and robustness metrics, an in-depth investigation of the impacts of these network uncertainties is performed. Furthermore, the forward and backward channels of the network are examined in detail in this study.
Performance Analysis of Universal Robot Control System Using Networked Predictive Control
Jul 18, 2022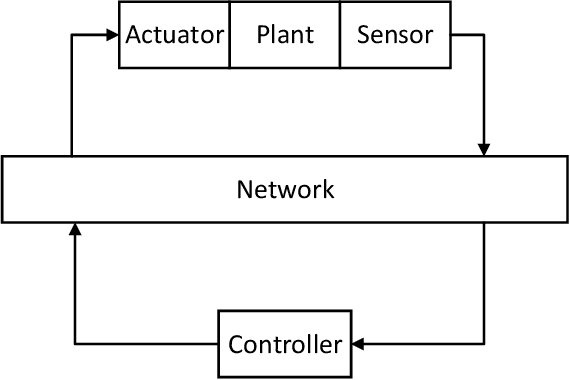
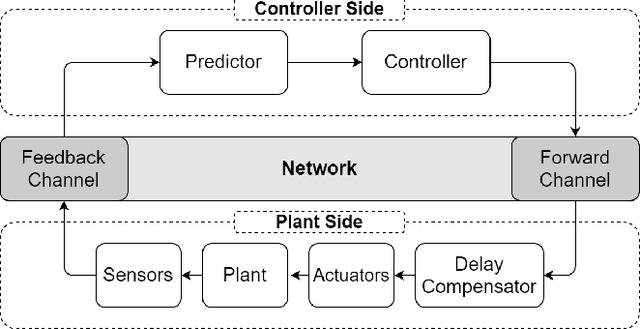
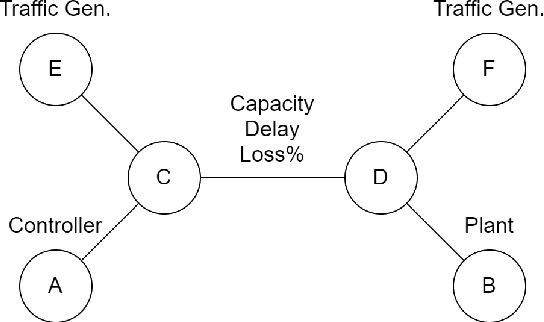
Networked control systems are feedback control systems with system components distributed at different locations connected through a communication network. Since the communication network is carried out through the internet and there are bandwidth and packet size limitations, network constraints appear. Some of these constraints are time delay and packet loss. These network limitations can degrade the performance and even destabilize the system. To overcome the adverse effect of these communication constraints, various approaches have been developed, among which a representative one is networked predictive control. This approach proposes a controller, which compensates for the network time delay and packet loss actively. This paper aims at implementing a networked predictive control system for controlling a robot arm through a computer network. The network delay is accounted for by a predictor, while the potential of packet loss is mitigated using redundant control packets. The results will show the stability of the system despite a high delay and a considerable packet loss. Additionally, improvements to previous networked predictive control systems will be suggested and an increase in performance can be shown. Lastly, the effects of different system and environment parameters on the control loop will be investigated.