 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Active Contour Model for Silhouette Vectorization using Bézier Curves
May 08, 2025In this paper, we propose an active contour model for silhouette vectorization using cubic B\'ezier curves. Among the end points of the B\'ezier curves, we distinguish between corner and regular points where the orientation of the tangent vector is prescribed. By minimizing the distance of the B\'ezier curves to the silhouette boundary, the active contour model optimizes the location of the B\'ezier curves end points, the orientation of the tangent vectors in the regular points, and the estimation of the B\'ezier curve parameters. This active contour model can use the silhouette vectorization obtained by any method as an initial guess. The proposed method significantly reduces the average distance between the silhouette boundary and its vectorization obtained by the world-class graphic software Inkscape, Adobe Illustrator, and a curvature-based vectorization method, which we introduce for comparison. Our method also allows us to impose additional regularity on the B\'ezier curves by reducing their lengths.
Reward Function Optimization of a Deep Reinforcement Learning Collision Avoidance System
Dec 01, 2022The proliferation of unmanned aircraft systems (UAS) has caused airspace regulation authorities to examine the interoperability of these aircraft with collision avoidance systems initially designed for large transport category aircraft. Limitations in the currently mandated TCAS led the Federal Aviation Administration to commission the development of a new solution, the Airborne Collision Avoidance System X (ACAS X), designed to enable a collision avoidance capability for multiple aircraft platforms, including UAS. While prior research explored using deep reinforcement learning algorithms (DRL) for collision avoidance, DRL did not perform as well as existing solutions. This work explores the benefits of using a DRL collision avoidance system whose parameters are tuned using a surrogate optimizer. We show the use of a surrogate optimizer leads to DRL approach that can increase safety and operational viability and support future capability development for UAS collision avoidance.
Developing Modular Autonomous Capabilities for sUAS Operations
Nov 01, 2022



Small teams in the field can benefit from the capabilities provided by small Uncrewed Aerial Systems (sUAS) for missions such as reconnaissance, hostile attribution, remote emplacement, and search and rescue. The mobility, communications, and flexible payload capacity of sUAS can offer teams new levels of situational awareness and enable more highly coordinated missions than previously possible. However, piloting such aircraft for specific missions draws personnel away from other mission-critical tasks, increasing the load on remaining personnel while also increasing complexity of operations. For wider adoption and use of sUAS for security and humanitarian missions, safe and robust autonomy must be employed to reduce this burden on small teams. In this paper, we present the development of the Collaborative-UAS for Hostile Attribution, Surveillance, Emplacement, and Reconnaissance (CHASER) testbed, for rapidly prototyping capabilities that will reduce strain on small teams through sensor-guided autonomous control. We attempt to address autonomy needs unfilled by commercial sUAS platforms by creating and testing a series of composable modules that can be configured to support multiple missions. Methods implemented and presented here include radar track correlation, on-board computer vision target detection, target position estimation, closed-loop relative position control, and efficient search of a 3D volume for target acquisition. We configure and test a series of these modules in an example mission, executing a fully autonomous chase of an intruding sUAS in live flight, and demonstrating the success of the modularized autonomy approach. We present performance results from simulation or live flight tests for each module. Lastly, we describe the software architecture that we have developed for flexible controls and comment on how the capabilities presented may enable additional missions.
Classification of Complex Wishart Matrices with a Diffusion-Reaction System guided by Stochastic Distances
Jul 17, 2015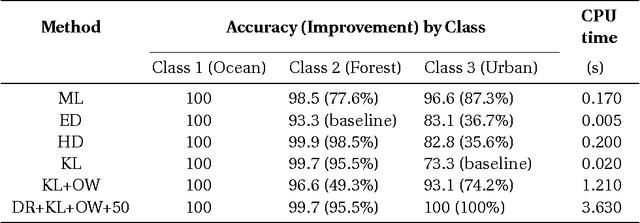
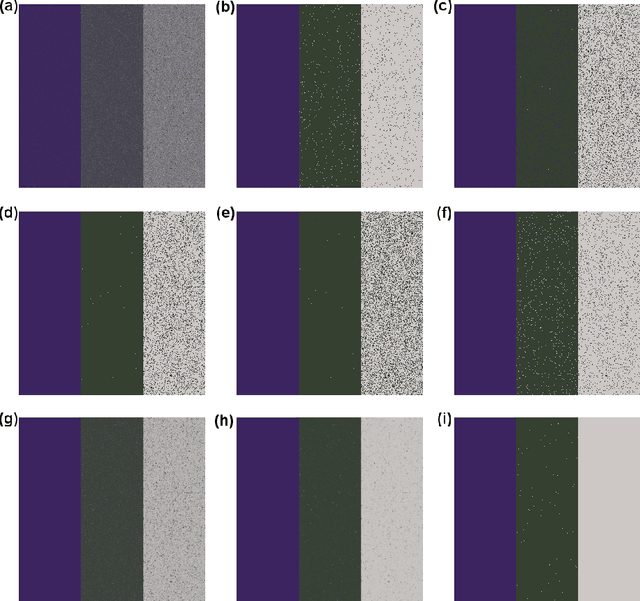
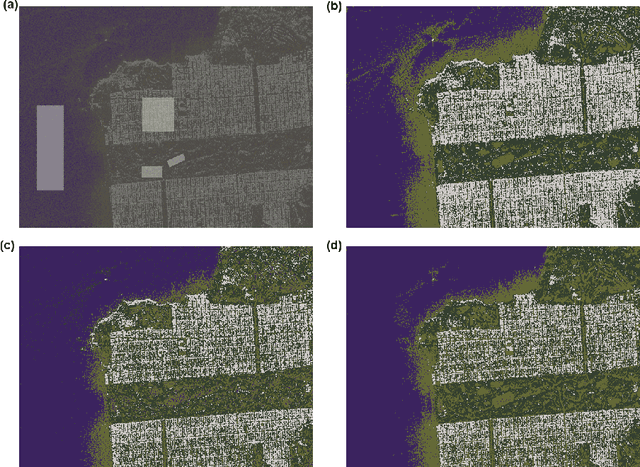
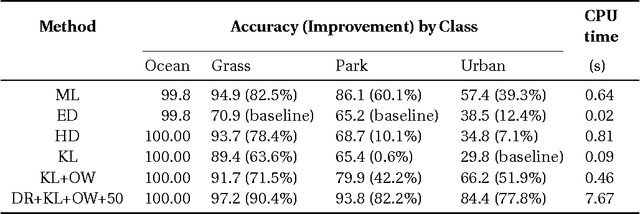
We propose a new method for PolSAR (Polarimetric Synthetic Aperture Radar) imagery classification based on stochastic distances in the space of random matrices obeying complex Wishart distributions. Given a collection of prototypes $\{Z_m\}_{m=1}^M$ and a stochastic distance $d(.,.)$, we classify any random matrix $X$ using two criteria in an iterative setup. Firstly, we associate $X$ to the class which minimizes the weighted stochastic distance $w_md(X,Z_m)$, where the positive weights $w_m$ are computed to maximize the class discrimination power. Secondly, we improve the result by embedding the classification problem into a diffusion-reaction partial differential system where the diffusion term smooths the patches within the image, and the reaction term tends to move the pixel values towards the closest class prototype. In particular, the method inherits the benefits of speckle reduction by diffusion-like methods. Results on synthetic and real PolSAR data show the performance of the method.