 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Computation of Distance Functions for Navigation Vector Fields in Lie Groups
Jun 03, 2026Vector-field-based methods are widely used for robot control and are often applied to the path-tracking problem. Some vector field approaches require repeatedly computing the distance between the robot configuration and the curve, as well as the corresponding closest point. Recently, vector fields have been extended to Lie Groups. In this case, this computation can be expensive, especially when performed at high control frequencies on embedded platforms. This paper proposes a method for efficiently computing the distance between a point and a curve represented as what is called a G-polynomial curve, which is a curve representation that generalizes polynomial curves to matrix Lie groups. The proposed approach exploits the structure of these curves to reduce the problem to a small number of polynomial root-finding computations. Simulation results show that the method significantly reduces computation time while maintaining accuracy compared to existing optimization-based approaches. Practical formulas are also provided for the case of the group SE(3), and the method is validated experimentally on a robotic manipulator. The methodology is implemented in a computational package, available online.
A cell-decomposition based path planner for 3D navigation in constrained workspaces
May 11, 2026This paper proposes a cell decomposition algorithm for binary occupancy grids that ensures mutual complete visibility from each cell to at least one adjacent cell. This decomposition establishes a simplified framework for verifying path feasibility that can be easily embedded in optimization problems. To illustrate its utility, we formulate both second-order cone programs (SOCP) and their mixed-integer variant (MISOCP) within the proposed framework. Furthermore, we propose the KSP-SOCP method, which combines Yen's k-shortest path algorithm with the SOCP, achieving improved solutions compared to a standard SOCP approach while avoiding the computational burden of MISOCP. The cell decomposition algorithm, KSP-SOCP, and MISOCP approaches were evaluated in 9 city-like workspaces. The decomposition efficiently partitioned each map, enabling both optimization methods to compute feasible paths. The proposed KSP-SOCP achieved time performance comparable to the MISOCP while requiring less memory, making it highly suitable for large-scale problems.
Constructive Vector Fields for Path Following in Fully-Actuated Systems on Matrix Lie Groups
Feb 25, 2026This paper presents a novel vector field strategy for controlling fully-actuated systems on connected matrix Lie groups, ensuring convergence to and traversal along a curve defined on the group. Our approach generalizes our previous work (Rezende et al., 2022) and reduces to it when considering the Lie group of translations in Euclidean space. Since the proofs in Rezende et al. (2022) rely on key properties such as the orthogonality between the convergent and traversal components, we extend these results by leveraging Lie group properties. These properties also allow the control input to be non-redundant, meaning it matches the dimension of the Lie group, rather than the potentially larger dimension of the space in which the group is embedded. This can lead to more practical control inputs in certain scenarios. A particularly notable application of our strategy is in controlling systems on SE(3) -- in this case, the non-redundant input corresponds to the object's mechanical twist -- making it well-suited for controlling objects that can move and rotate freely, such as omnidirectional drones. In this case, we provide an efficient algorithm to compute the vector field. We experimentally validate the proposed method using a robotic manipulator to demonstrate its effectiveness.
Online path planning for kinematic-constrained UAVs in a dynamic environment based on a Differential Evolution algorithm
Oct 24, 2024
This research presents an online path planner for Unmanned Aerial Vehicles (UAVs) that can handle dynamic obstacles and UAV motion constraints, including maximum curvature and desired orientations. Our proposed planner uses a NURBS path representation and a Differential Evolution algorithm, incorporating concepts from the Velocity Obstacle approach in a constraint function. Initial results show that our approach is feasible and provides a foundation for future extensions to three-dimensional (3D) environments.
Autonomous Navigation System for a Delivery Drone
Jun 16, 2021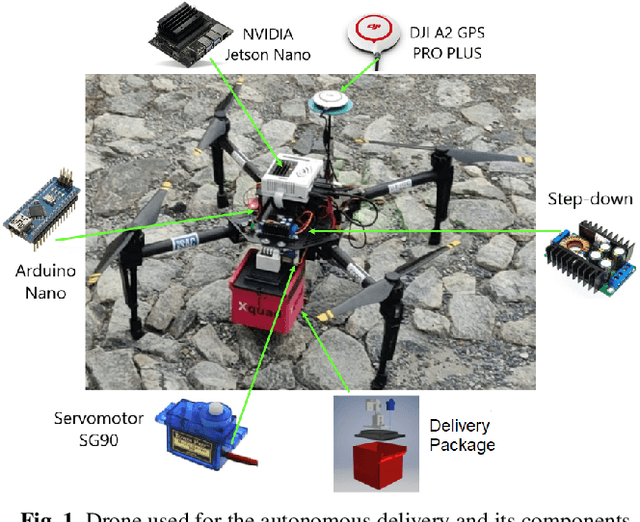
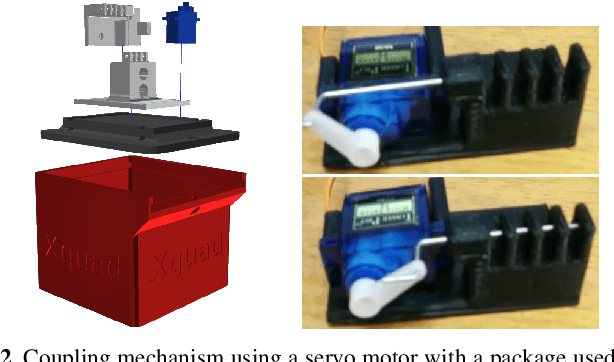
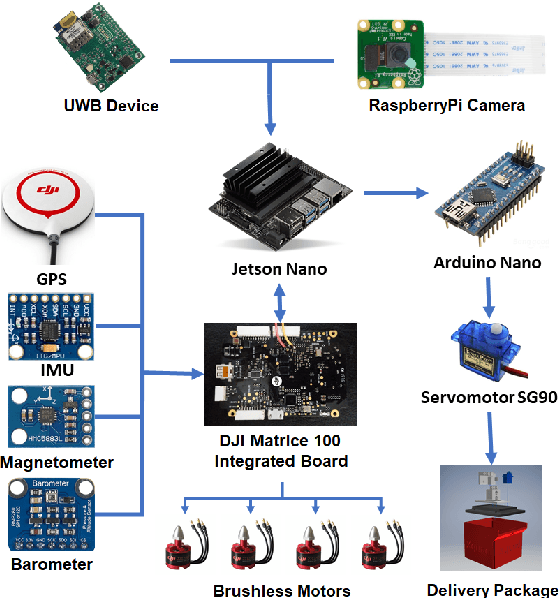
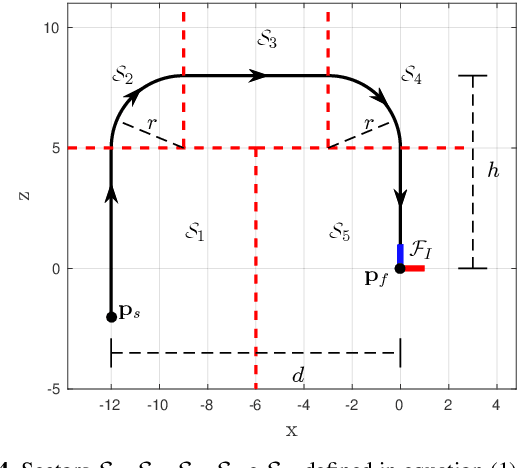
The use of delivery services is an increasing trend worldwide, further enhanced by the COVID pandemic. In this context, drone delivery systems are of great interest as they may allow for faster and cheaper deliveries. This paper presents a navigation system that makes feasible the delivery of parcels with autonomous drones. The system generates a path between a start and a final point and controls the drone to follow this path based on its localization obtained through GPS, 9DoF IMU, and barometer. In the landing phase, information of poses estimated by a marker (ArUco) detection technique using a camera, ultra-wideband (UWB) devices, and the drone's software estimation are merged by utilizing an Extended Kalman Filter algorithm to improve the landing precision. A vector field-based method controls the drone to follow the desired path smoothly, reducing vibrations or harsh movements that could harm the transported parcel. Real experiments validate the delivery strategy and allow to evaluate the performance of the adopted techniques. Preliminary results state the viability of our proposal for autonomous drone delivery.
Pose consensus based on dual quaternion algebra with application to decentralized formation control of mobile manipulators
Oct 21, 2018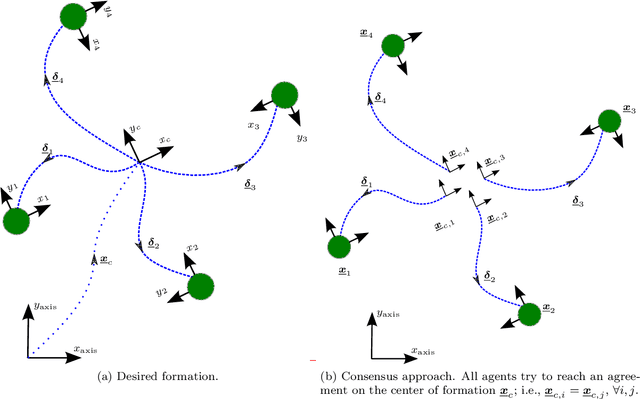
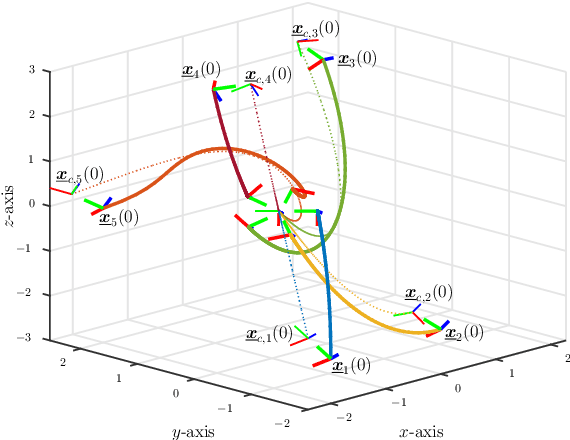
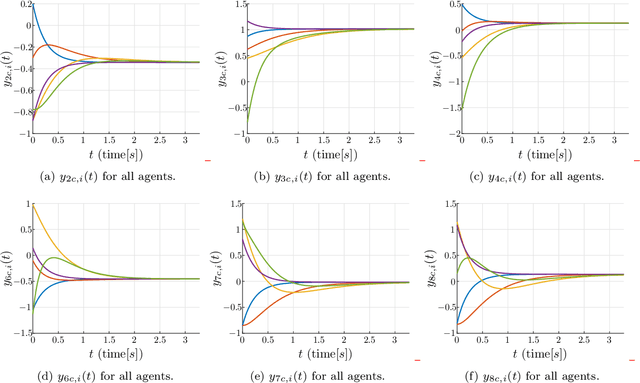
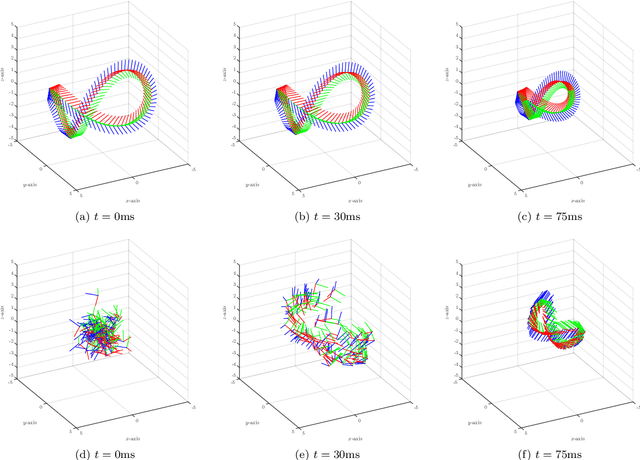
This paper presents a solution based on dual quaternion algebra to the general problem of pose (i.e., position and orientation) consensus for systems composed of multiple rigid-bodies. The dual quaternion algebra is used to model the agents' poses and also in the distributed control laws, making the proposed technique easily applicable to formation control of general robotic systems. The proposed pose consensus protocol has guaranteed convergence when the interaction among the agents is represented by directed graphs with directed spanning trees, which is a more general result when compared to the literature on formation control. In order to illustrate the proposed pose consensus protocol and its extension to the problem of formation control, we present a numerical simulation with a large number of free-flying agents and also an application of cooperative manipulation by using real mobile manipulators.