 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-Enabled Low-Altitude UAV Natural Language Navigation via Signal Temporal Logic Specification Translation and Repair
Mar 29, 2026Natural language (NL) navigation for low-altitude unmanned aerial vehicles (UAVs) offers an intelligent and convenient solution for low-altitude aerial services by enabling an intuitive interface for non-expert operators. However, deploying this capability in urban environments necessitates the precise grounding of underspecified instructions into safety-critical, dynamically feasible motion plans subject to spatiotemporal constraints. To address this challenge, we propose a unified framework that translates NL instructions into Signal Temporal Logic (STL) specifications and subsequently synthesizes trajectories via mixed-integer linear programming (MILP). Specifically, to generate executable STL formulas from free-form NL, we develop a reasoning-enhanced large language model (LLM) leveraging chain-of-thought (CoT) supervision and group-relative policy optimization (GRPO), which ensures high syntactic validity and semantic consistency. Furthermore, to resolve infeasibilities induced by stringent logical or spatial requirements, we introduce a specification repair mechanism. This module combines MILP-based diagnosis with LLM-guided semantic reasoning to selectively relax task constraints while strictly enforcing safety guarantees. Extensive simulations and real-world flight experiments demonstrate that the proposed closed-loop framework significantly improves NL-to-STL translation robustness, enabling safe, interpretable, and adaptable UAV navigation in complex scenarios.
MMSense: Adapting Vision-based Foundation Model for Multi-task Multi-modal Wireless Sensing
Nov 15, 2025Large AI models have been widely adopted in wireless communications for channel modeling, beamforming, and resource optimization. However, most existing efforts remain limited to single-modality inputs and channel-specific objec- tives, overlooking the broader potential of large foundation models for unified wireless sensing. To bridge this gap, we propose MMSense, a multi-modal, multi-task foundation model that jointly addresses channel-centric, environment-aware, and human-centered sensing. Our framework integrates image, radar, LiDAR, and textual data by transforming them into vision- compatible representations, enabling effective cross-modal align- ment within a unified feature space. A modality gating mecha- nism adaptively fuses these representations, while a vision-based large language model backbone enables unified feature align- ment and instruction-driven task adaptation. Furthermore, task- specific sequential attention and uncertainty-based loss weighting mechanisms enhance cross-task generalization. Experiments on real wireless scenario datasets show that our approach outper- forms both task-specific and large-model baselines, confirming its strong generalization across heterogeneous sensing tasks.
Deep Learning Based Intelligent Inter-Vehicle Distance Control for 6G Enabled Cooperative Autonomous Driving
Dec 26, 2020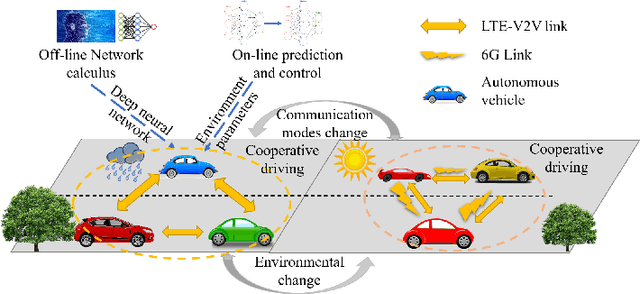
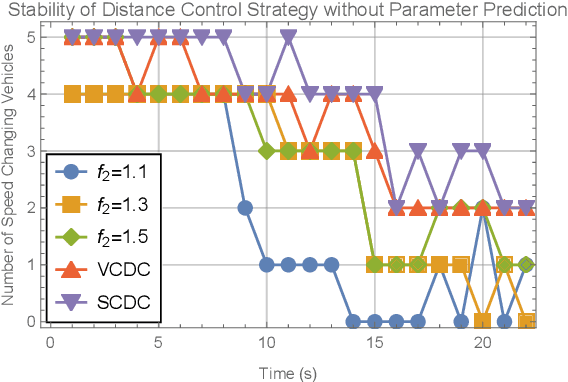
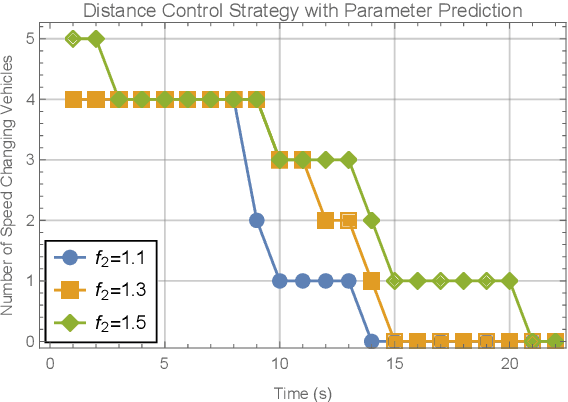
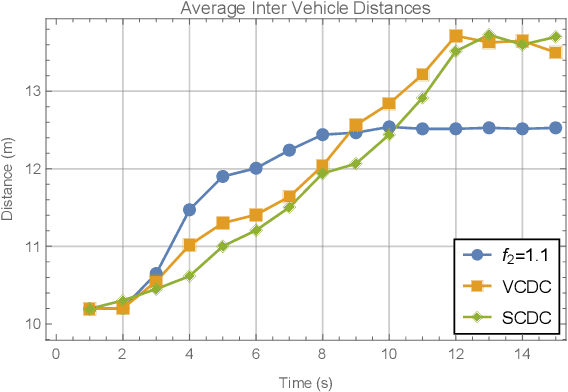
Research on the sixth generation cellular networks (6G) is gaining huge momentum to achieve ubiquitous wireless connectivity. Connected autonomous driving (CAV) is a critical vertical envisioned for 6G, holding great potentials of improving road safety, road and energy efficiency. However the stringent service requirements of CAV applications on reliability, latency and high speed communications will present big challenges to 6G networks. New channel access algorithms and intelligent control schemes for connected vehicles are needed for 6G supported CAV. In this paper, we investigated 6G supported cooperative driving, which is an advanced driving mode through information sharing and driving coordination. Firstly we quantify the delay upper bounds of 6G vehicle to vehicle (V2V) communications with hybrid communication and channel access technologies. A deep learning neural network is developed and trained for fast computation of the delay bounds in real time operations. Then, an intelligent strategy is designed to control the inter-vehicle distance for cooperative autonomous driving. Furthermore, we propose a Markov Chain based algorithm to predict the parameters of the system states, and also a safe distance mapping method to enable smooth vehicular speed changes. The proposed algorithms are implemented in the AirSim autonomous driving platform. Simulation results show that the proposed algorithms are effective and robust with safe and stable cooperative autonomous driving, which greatly improve the road safety, capacity and efficiency.