 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bayesian Reasoning Framework for Robotic Systems in Autonomous Casualty Triage
Apr 23, 2026Autonomous robots deployed in mass casualty incidents (MCI) face the challenge of making critical decisions based on incomplete and noisy perceptual data. We present an autonomous robotic system for casualty assessment that fuses outputs from multiple vision-based algorithms, estimating signs of severe hemorrhage, visible trauma, or physical alertness, into a coherent triage assessment. At the core of our system is a Bayesian network, constructed from expert-defined rules, which enables probabilistic reasoning about a casualty's condition even with missing or conflicting sensory inputs. The system, evaluated during the DARPA Triage Challenge (DTC) in realistic MCI scenarios involving 11 and 9 casualties, demonstrated a nearly three-fold improvement in physiological assessment accuracy (from 15\% to 42\% and 19\% to 46\%) compared to a vision-only baseline. More importantly, overall triage accuracy increased from 14\% to 53\%, while the diagnostic coverage of the system expanded from 31\% to 95\% of cases. These results demonstrate that integrating expert-guided probabilistic reasoning with advanced vision-based sensing can significantly enhance the reliability and decision-making capabilities of autonomous systems in critical real-world applications.
Multimodal Bayesian Network for Robust Assessment of Casualties in Autonomous Triage
Dec 21, 2025Mass Casualty Incidents can overwhelm emergency medical systems and resulting delays or errors in the assessment of casualties can lead to preventable deaths. We present a decision support framework that fuses outputs from multiple computer vision models, estimating signs of severe hemorrhage, respiratory distress, physical alertness, or visible trauma, into a Bayesian network constructed entirely from expert-defined rules. Unlike traditional data-driven models, our approach does not require training data, supports inference with incomplete information, and is robust to noisy or uncertain observations. We report performance for two missions involving 11 and 9 casualties, respectively, where our Bayesian network model substantially outperformed vision-only baselines during evaluation of our system in the DARPA Triage Challenge (DTC) field scenarios. The accuracy of physiological assessment improved from 15% to 42% in the first scenario and from 19% to 46% in the second, representing nearly threefold increase in performance. More importantly, overall triage accuracy increased from 14% to 53% in all patients, while the diagnostic coverage of the system expanded from 31% to 95% of the cases requiring assessment. These results demonstrate that expert-knowledge-guided probabilistic reasoning can significantly enhance automated triage systems, offering a promising approach to supporting emergency responders in MCIs. This approach enabled Team Chiron to achieve 4th place out of 11 teams during the 1st physical round of the DTC.
Toward Robotically Automated Femoral Vascular Access
Jul 06, 2021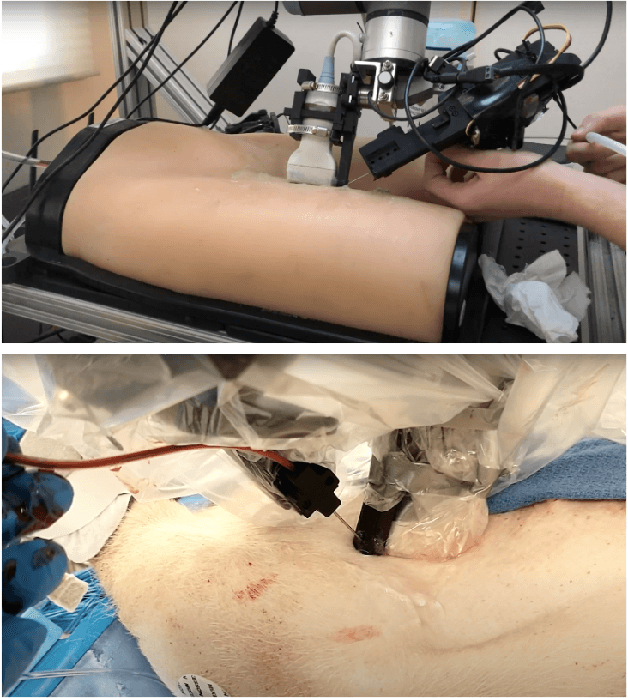
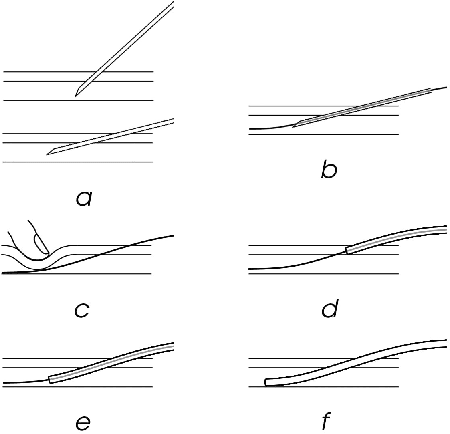
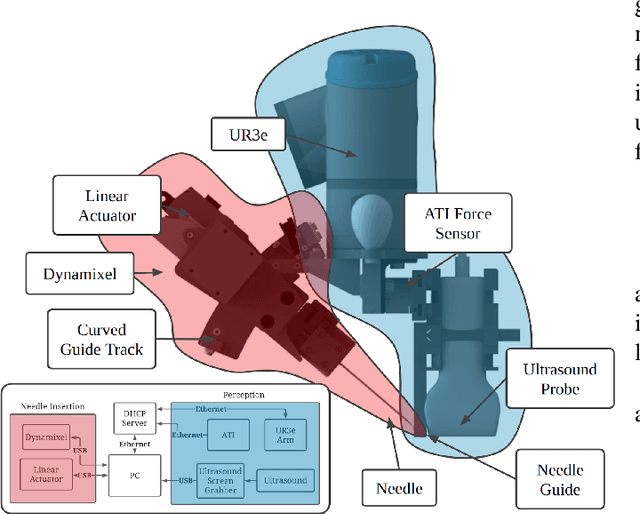
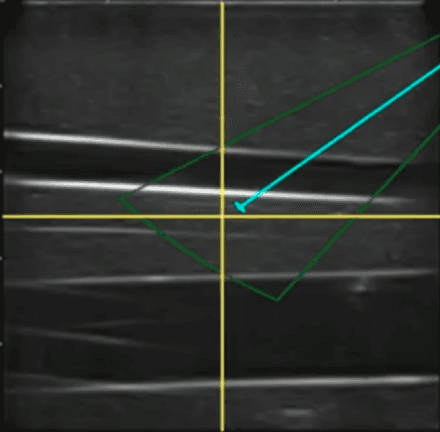
Advanced resuscitative technologies, such as Extra Corporeal Membrane Oxygenation (ECMO) cannulation or Resuscitative Endovascular Balloon Occlusion of the Aorta (REBOA), are technically difficult even for skilled medical personnel. This paper describes the core technologies that comprise a teleoperated system capable of granting femoral vascular access, which is an important step in both of these procedures and a major roadblock in their wider use in the field. These technologies include a kinematic manipulator, various sensing modalities, and a user interface. In addition, we evaluate our system on a surgical phantom as well as in-vivo porcine experiments. These resulted in, to the best of our knowledge, the first robot-assisted arterial catheterizations; a major step towards our eventual goal of automatic catheter insertion through the Seldinger technique.